Machine Inertia
Machine inertia parameterized using machine inertia constant or anchor inertia

Libraries:
Simscape /
Electrical /
Electromechanical /
Mechanical
Description
The Machine Inertia block models inertia and damping that you connect to the mechanical rotational R port of a three-phase machine. The block has an internal connection to a mechanical rotational reference. The figure shows an equivalent configuration to the Machine Inertia block using Simscape™ mechanical rotational components.

Based on the value you select for the Specify inertia parameterization by parameter, you specify inertia J directly or using the machine inertia constant H.
If you specify the inertia constant, the block calculates inertia by
where:
J is inertia in kg⋅m2.
H is the inertia constant in sW/VA.
Srated is the machine rated apparent power in VA.
Frated is the machine rated electrical frequency in Hz.
N is the number of machine pole pairs.
You specify damping that represents viscous friction between the machine rotor and mechanical rotational reference. Based on the value you select for the Specify damper parameterization by parameter, you specify a damping coefficient in SI units or in per-unit. If you specify the damping coefficient in per-unit, the block calculates the damping coefficient in SI units by
and
where:
ωbase is the base mechanical angular speed in rad/s.
Tbase is the base damping torque in Nm.
Dbase is the base damping coefficient in Nm/(rad/s).
Dpu is the damping coefficient in per-unit.
D is the damping coefficient in SI units of Nm/(rad/s).
Display Option
You can display the machine per-unit base values and inertia parameters in the MATLAB® Command Window. To display the machine parameters, in the Utilities section, click the Display button next to the Parameters parameter.
Examples
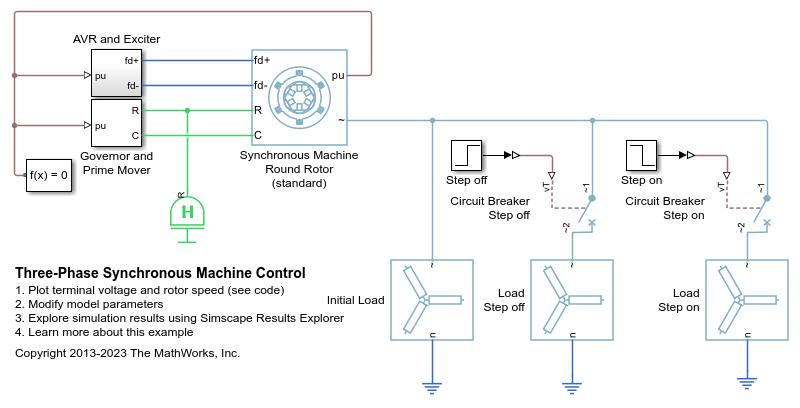
Three-Phase Synchronous Machine Control
Control and initialize a Synchronous Machine (SM). The test circuit shows the SM operating as a generator. The terminal voltage is controlled using an AVR and the speed is controlled using a governor.
Ports
Conserving
Parameters
References
[1] Kundur, P. Power System Stability and Control. New York, NY: McGraw Hill, 1993.