SRM Current Controller
Current control for switched reluctance machines

Libraries:
Simscape /
Electrical /
Control /
SRM Control
Description
The SRM Current Controller block performs discrete-time proportional-integral (PI) current control for the Switched Reluctance Machine (SRM) block.
Equations
To determine the duty cycle, the block implements discrete-time proportional-integral (PI) current control in accordance with this equation.
Where:
D is the duty cycle.
Kp is the proportional gain.
Ki is the integral gain.
Ts is the sample time.
Is_ref is the reference current.
Is is the measured current.
To obtain control signals for the three-phases, the block then multiplies the duty cycle with the commutation signals. The resulting three control signals are normalized over the interval [0, 1].
Examples
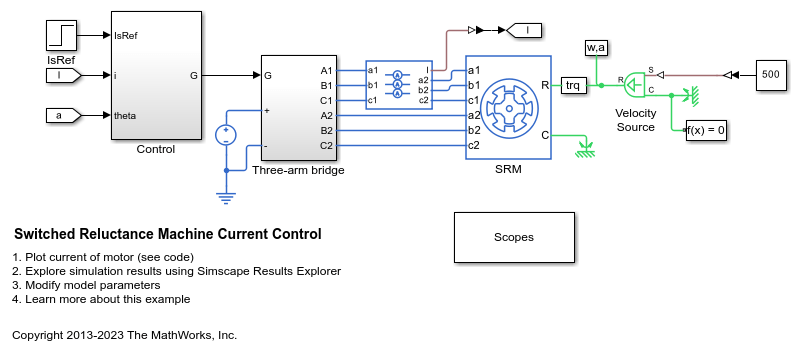
Switched Reluctance Machine Current Control
Control the current amplitude in a switched reluctance machine (SRM) based electrical drive. A DC voltage source feeds the SRM through a controlled three-arm bridge. An ideal angular velocity source provides the load. The converter turn-on and turn-off angles are maintained constant. A PI-based current controller regulates the current amplitude.
Ports
Input
Output
Parameters
References
[1] Saha, N. and S. Panda. "Speed control with torque ripple reduction of switched reluctance motor by Hybrid Many Optimizing Liaison Gravitational Search technique." Engineering Science and Technology. Vol 20 (2017): 909–921.
Extended Capabilities
Version History
Introduced in R2018a