构建简单的 DC 电机并对其进行仿真
在此示例中,您将对一个由常量输入信号(近似为脉冲宽度调制信号)驱动的 DC 电机进行建模,并查看电机输出端的电流和旋转运动。
要查看您在此示例中创建的已完成模型,请打开使用 PWM 电压源和 H 桥驱动器控制 DC 电机示例。
选择表示系统组件的模块
选择表示输入信号、DC 电机和电机输出显示的模块。
下表描述了表示系统组件的各模块的作用。
模块 | 描述 |
|---|---|
| Solver Configuration | 定义适用于所有物理建模模块的求解器设置 |
| PS-Simulink Converter | 将输入物理信号转换为 Simulink® 信号 |
| Controlled PWM Voltage | 生成近似脉冲宽度调制电机输入信号的信号 |
| H-Bridge | 驱动 DC 电机 |
| DC Motor | 将输入电能转换为机械运动 |
| Current Sensor | 将用于驱动电机的电流转换为与电流成比例的可测量物理信号 |
| DC Voltage Source | 生成 DC 电压 |
| Electrical Reference | 提供电气接地 |
| Mechanical Rotational Reference | 提供机械接地 |
| Ideal Rotational Motion Sensor | 将电机的旋转运动转换为与运动成比例的可测量物理信号 |
| Scope | 显示电机电流和旋转运动 |
构建模型
创建一个新模型。
添加下表中的模块。库路径列指定了每个模块的层级路径。
模块
库路径
数量
Solver Configuration Simscape > Utilities
1
PS-Simulink Converter Simscape > Utilities
2
Controlled PWM Voltage Simscape > Electrical > Integrated Circuits
1
H-Bridge Simscape > Electrical > Semiconductors & Converters > Converters
1
DC Motor Simscape > Electrical > Electromechanical > Brushed Motors
1
Current Sensor Simscape > Foundation Library > Electrical > Electrical Sensors
1
DC Voltage Source Simscape > Foundation Library > Electrical > Electrical Sources
1
Electrical Reference Simscape > Foundation Library > Electrical > Electrical Elements
1
Mechanical Rotational Reference Simscape > Foundation Library > Mechanical > Rotational Elements
1
Ideal Rotational Motion Sensor Simscape > Foundation Library > Mechanical > Mechanical Sensors
1
Scope Simulink > Commonly Used Blocks
2
注意
您可以使用 Simscape™ 函数
sscnew,并将域类型指定为electrical,以创建包含下列模块的 Simscape 模型:Simulink-PS Converter
PS-Simulink Converter
Scope
Solver Configuration
Electrical Reference
重命名模块,并按下图所示连接各模块。

现在您已准备变绪,可以指定模块参数了。
指定模型参数
指定以下参数来表示系统组件的行为:
模型设置参数
以下模块指定不专属于特定模块的模型信息:
Solver Configuration
Electrical Reference
Mechanical Rotational Reference
与 Simscape 模型一样,每个独特拓扑物理网络中都必须包含一个 Solver Configuration 模块。此示例中只有一个物理网络,因此只需使用一个带有默认参数值的 Solver Configuration 模块。
每个 Simscape Electrical™ 网络中都必须包含一个 Electrical Reference 模块。每个包含机电模块的网络中都必须包含一个 Mechanical Rotational Reference 模块。这些模块没有任何参数。
有关使用参考模块的详细信息,请参阅Grounding Rules。
电机输入信号参数
使用以下模块生成电机输入信号:
DC Voltage Source 模块 (PWM reference voltage) 生成常量信号。
Controlled PWM Voltage 模块生成脉冲宽度调制信号。
H-Bridge 模块驱动电机。
在此示例中,H-Bridge 模块除 PWM 端口之外的所有输入端口均接地。因此,H-Bridge 模块的行为如下:
电机接通时,H-Bridge 模块将电机端子连接至电源。
电机关闭时,H-Bridge 模块充当续流二极管以维持电机电流。
在此示例中,使用恒定电流对电机进行仿真,该电流的值是 PWM 信号的平均值。通过使用此类型的信号,您可以建立一个快速仿真来估计电机行为。
在 DC Voltage Source 模块中,将恒定电压参数设置为
2.5V。设置 Controlled PWM Voltage 模块的参数:
PWM 频率 -
4000Hz仿真模式 -
Averaged该值指示模块生成一个输出信号,其值是 PWM 信号的平均值。使用平均信号对电机进行仿真可以估计 PWM 信号作用下的电机行为。要验证此逼近,请使用 PWM 作为此参数的值。
在 H-Bridge 模块中,将仿真模式参数设置为平均。
该值指示模块生成一个输出信号,其值是 PWM 信号的平均值。使用平均信号对电机进行仿真可以估计 PWM 信号作用下的电机行为。要验证此逼近,请使用 PWM 作为此参数的值。
注意
Controlled PWM Voltage 模块和 H-Bridge 模块的仿真模式必须相同。
电机参数
配置用于对电机进行建模的模块。
设置 DC Motor 模块的参数,在适用的情况下将单位设置保留为默认值:
电磁转矩部分:
模型参数化 -
By rated load and speed电枢电感 -
0.01H空载转速 -
4000rpm额定转速(在额定负载下) -
2500rpm额定负载(机械功率) -
10W额定 DC 电源电压 -
12V
机械部分:
转子惯量 -
0.0002kg*m^2转子阻尼 -
0.5e-5N*m/(rad/s)
电流显示参数
指定用于创建电机电流显示的模块参数:
Current Sensor 模块
PS-Simulink Converter1 模块
Current 示波器
在这三个模块中,只有 PS-Simulink Converter1 模块具有参数。将 PS-Simulink Converter1 模块的输出信号单位参数设置为 A,以指示模块输入信号的单位为安培。
转矩显示参数
指定用于创建电机转矩显示的模块参数:
Ideal Rotational Motion Sensor 模块
PS-Simulink Converter 模块
RPM 示波器
在这三个模块中,只有 PS-Simulink Converter 模块需要您在此示例中进行参数配置。将 PS-Simulink Converter 模块的输出信号单位参数设置为 rpm,以指示模块输入信号的单位为每分钟转数。
注意
您必须手动键入此参数值。下拉列表中未提供该值。
配置求解器参数
配置求解器参数以使用连续时间求解器。仅当您清除了 Solver Configuration 模块的局部求解器参数时,Simscape Electrical 模型才会使用连续时间求解器运行。使用“配置参数”对话框更改仿真结束时间,收紧相对容差以实现更精确的仿真,以及删除对 Simulink 保存的仿真数据点数量的限制。
在模型窗口中,选择建模 > 模型设置,以打开“配置参数”对话框。
在左窗格中,点击求解器:
将停止时间设置为
10。将求解器设置为 ode15s (Stiff/NDF)。
将最大步长设置为
1。将相对容差设置为
1e-3。
点击确定。
有关配置求解器参数的详细信息,请参阅Simulating an Electronic, Mechatronic, or Electrical Power System。
运行仿真并分析结果
运行仿真并绘制结果。在模型窗口中,选择仿真 > 运行。
要查看电机电流和转矩,请双击 Scope 模块。您可以在运行仿真之前或之后执行此操作。
注意
默认情况下,示波器显示窗口会在屏幕上堆叠显示,因此您只能看到其中一个。点击并拖动窗口可将其重新定位。
下图显示了电机电流。

下图显示了电机转速。
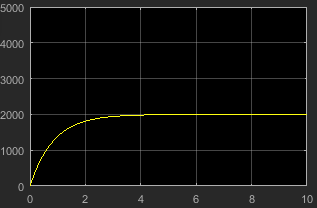
正如预期的那样,当施加的 DC 电压为 2.5 V 时,电机以约 2000 rpm 的转速运行。
另请参阅
Controlled PWM Voltage | DC Motor | H-Bridge