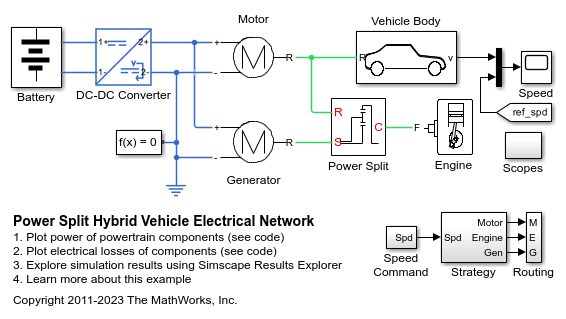
Power Split Hybrid Vehicle Electrical Network
This example shows the basic architecture of a power-split hybrid transmission. The planetary gear, along with the motor and generator, acts like a variable ratio gear. In this test, the vehicle accelerates from 15 m/s to 20 m/s, and then decelerates back to 15 m/s. The power management strategy uses just electrical power to perform the maneuver.
The motor, generator, and DC-DC converter are modeled using Simscape™ Electrical™ library blocks. These blocks use energy-based system-level equations that result in an efficient simulation whilst still capturing conversion losses. As such, the model is suitable for supporting design of the power management strategy. This example can be directly compared with the Simscape Driveline™ sdl_hybrid_power_split example which also includes more accurate representations of the engine, tires and mechanical gears.
Model
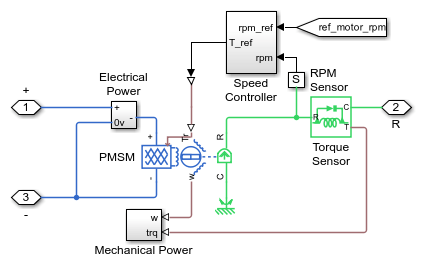
Motor Subsystem
Simulation Results from Simscape Logging
The plot below shows the flow of power from the engine, motor, and generator as the vehicle accelerates and decelerates. The generator supplies the DC network with a constant flow of power drawn from the engine. The motor draws power from the battery to accelerate the vehicle and then uses regenerative braking to feed that power back to the battery.

The plot below shows the electrical losses from the motor, generator, and battery as the vehicle accelerates and decelerates. The largest losses come from the motor and the battery.

Results from Real-Time Simulation
This example has been tested on these platforms:
Speedgoat™ Performance real-time target machine with an Intel® 3.5 GHz i7 multi-core CPU and 4 GB RAM.
dSPACE® SCALEXIO LabBox with Intel® Core XEON E3-1275v3 at 3.5GHz and 4 GB RAM.
You can run this model in real time with a step size of 50 microseconds by using the Simscape local solver. For small sample rates, a task overrun might occur during the initial task execution due to a cold cache. To avoid this overrun, if the selected platform supports these options, relax the start-up behavior by specifying a limited number of task overruns or increasing the sample time of periodic tasks during the start-up phase of the real-time application.
See Also
DC-DC Converter | Motor & Drive (System Level)