四轴无人机建模
此示例展示了如何对沿包裹派送路径导航的四轴飞行器进行建模。您可以在 MATLAB® 中下载此模型,或从 MATLAB Central File Exchange 和 GitHub® 访问此模型。
示例概览
在本示例中,您将学习如何:
估计电流消耗和无人机航程。
使用底盘和螺旋桨的 CAD 文件对机械系统进行建模。
使用级联比例-积分-导数 (PID) 控制器调整电机转速,从而控制高度和姿态。
使用路径跟随和转速控制器下达高级命令。
使用 Python® 查询气象数据库,获取特定于位置的风况。
使用阵风曲线测试无人机控制器的稳定性。
使用 MATLAB 的盈利能力分析,探索技术与商业之间的权衡。
如果您有 Parallel Computing Toolbox™,则还可以使用参数扫描完成以下操作:
改变包裹的质量,观察其对四轴飞行器轨迹的影响。
改变四轴飞行器的目标速度,观察它是否能沿目标路径飞行。
您可以使用 CAD 设计四轴飞行器的机身,并将模型导入 Simscape™ Multibody™。为了实现快速仿真,电机以抽象方式捕获功率转换的动态特性。当到达最终路点且符合一系列投放条件时,四轴飞行器会投放包裹。有关此示例的详细信息,请按照以下步骤操作,对 Web 浏览器中打开的概览内容做进一步的探索,或参阅 Quadcopter Drone Model in Simscape (MATLAB Central File Exchange)。
下载文件
使用 gitclone 函数在当前文件夹中克隆最新的存储库。
gitclone("https://github.com/mathworks/Quadcopter-Drone-Model-Simscape");或者,选择以下任一方式进行下载。您可以使用以下任一方式下载与早期 MATLAB 版本兼容的最新工程文件和版本。
从 Quadcopter Drone Model in Simscape (MATLAB Central File Exchange) 下载此工程的 ZIP 文件。
从 Quadcopter Drone Model in Simscape (GitHub) 克隆 Git™ 存储库。
打开工程
使用 gitclone 函数后,MATLAB 会在当前文件夹中创建一个新文件夹。此示例使用工程来管理支持文件。打开 Quadcopter_Drone 工程文件。如果有任何已打开的工程,MATLAB 会先将其关闭,然后再加载此工程。配置工程环境需要几分钟时间,因为该模型有数百个支持文件。点击顶层模型画布上的 Learn More 超链接可以在 Web 浏览器中打开概览,帮助您探索该模型的子系统和构造。该概览还会展示主要仿真结果。
openProject("Quadcopter-Drone-Model-Simscape");探索工程
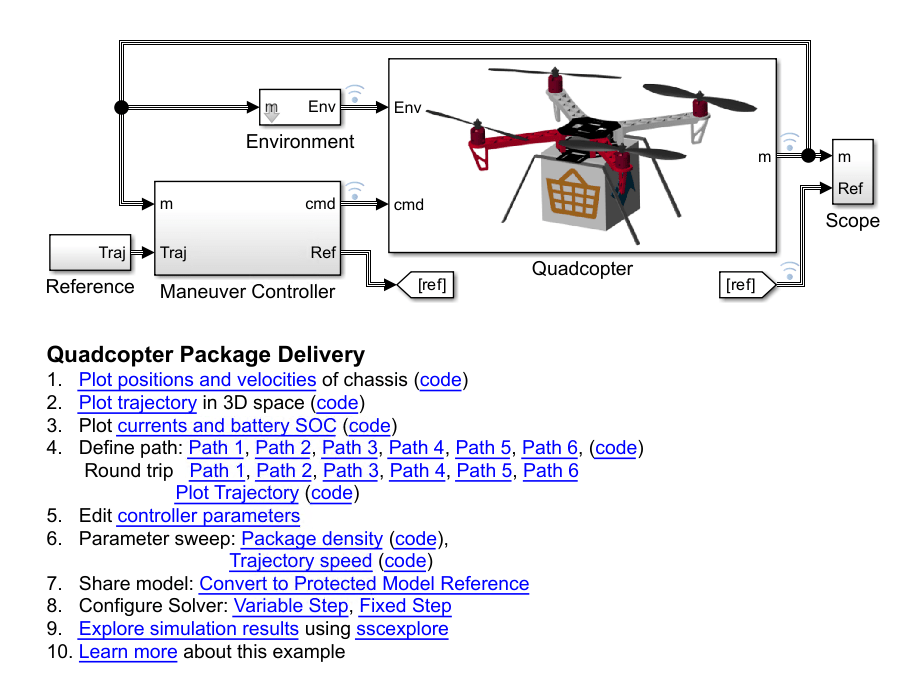
四轴飞行器和控制系统
顶层模型展示了四轴飞行器和控制系统。点击画布上的超链接可绘制底盘的位置和速度,并在三维空间中绘制轨迹。您还可以绘制通过电池的电流和电池荷电状态 (SOC)。
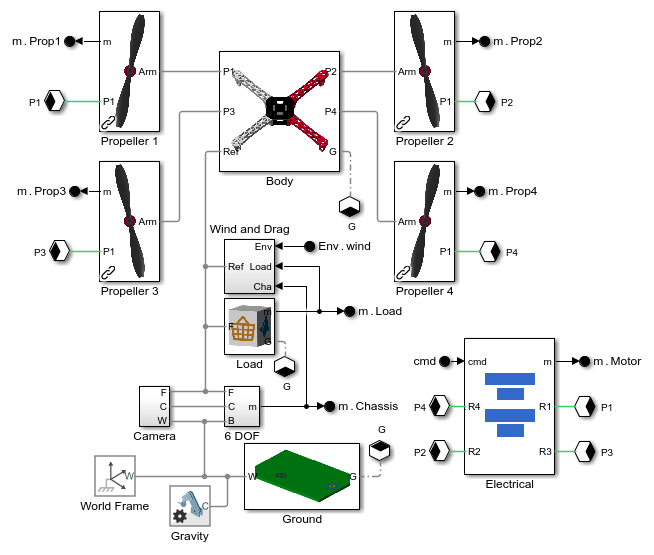
四轴飞行器机械和电气系统
在 Quadcopter 子系统的封装下查找。该子系统对机身、螺旋桨以及作用在四轴飞行器上的力进行建模。
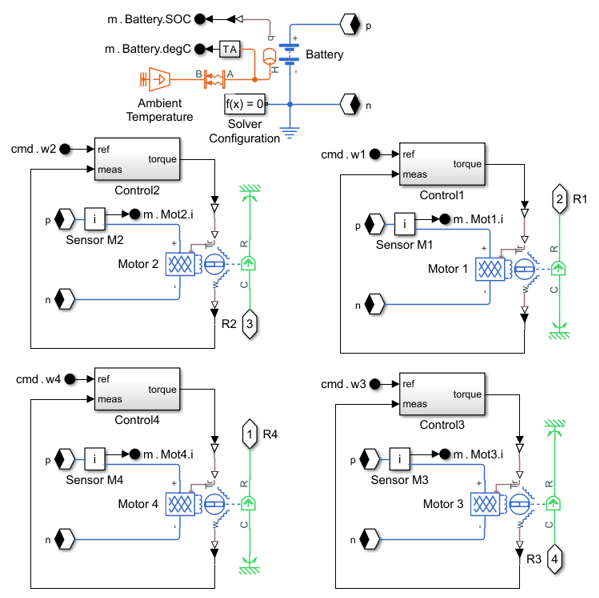
四轴飞行器电机和电池
在 Quadcopter 子系统内部,查看 Electrical 子系统封装下的内容。该子系统对电机和电池进行建模。
要查找 MathWorks Simscape Team 提供的最新示例,请访问 MATLAB Central 上的 MathWorks Simscape Team。