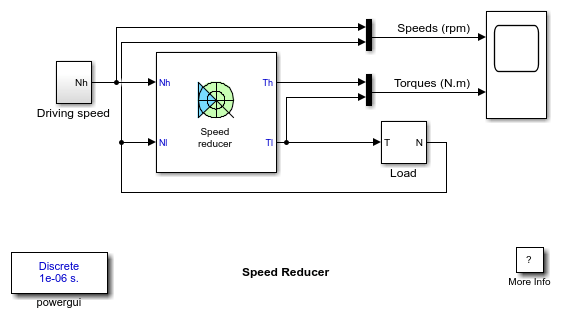
Speed Reducer
This example shows the speed reducer model connected between a high-speed shaft and a low-speed shaft.
C.Semaille, Louis-A. Dessaint (Ecole de technologie superieure, Montreal)
Description
The speed reducer is driven by a variable speed source and is connected to a load. The load has an inertia of 30 kg*m^2 and a viscous friction term of 0.5 N.m.s.
The reduction device has a reduction ratio of 10 and its inertia with respect to the high-speed side is 0.0005 kg*m^2.
The high-speed shaft has a stiffness of 17190 N.m and an internal damping factor of 600 N.m.s. This shaft is designed to have 0.1 degree of angular deflection for a 30 N.m load torque. The low-speed shaft, having a higher torque to transmit, has a stiffness of 171900 N.m and an internal damping factor of 6000 N.m.s. This shaft is designed to have 0.1 degree of angular deflection for a 300 N.m load torque.
Simulation
Start the simulation. You can observe the driving (high-speed) and load speeds (low-speed), the torque transmitted by the high-speed shaft and the torque transmitted by the low-speed shaft on the scope.
At t = 0 s, the driving speed starts climbing to 1750 rpm with a 500 rpm/s acceleration ramp. This causes the transmitted torque of the high-speed shaft to jump to about 18 N.m. Because of the reduction device, the torque transmitted to the load by the low-speed shaft is a lot bigger and is worth about 170 N.m.
During the accelerating phase, both torques keep increasing in order to compensate the viscous friction of the load. Notice that the load accelerates with a ramp of +50 rpm/s due to the reduction ratio of the speed reducer.
At t = 3.5 s, the driving speed settles at 1750 rpm. Since no more accelerating torque is needed, the input and output torques decrease and stabilize respectively to 0.965 N.m and 9.16 N.m at t = 4 s. The load speed is now equal to 175 rpm.
Notes
1) The speed reducer has been discretized with a 1 us time step.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)