Switched Reluctance Motor
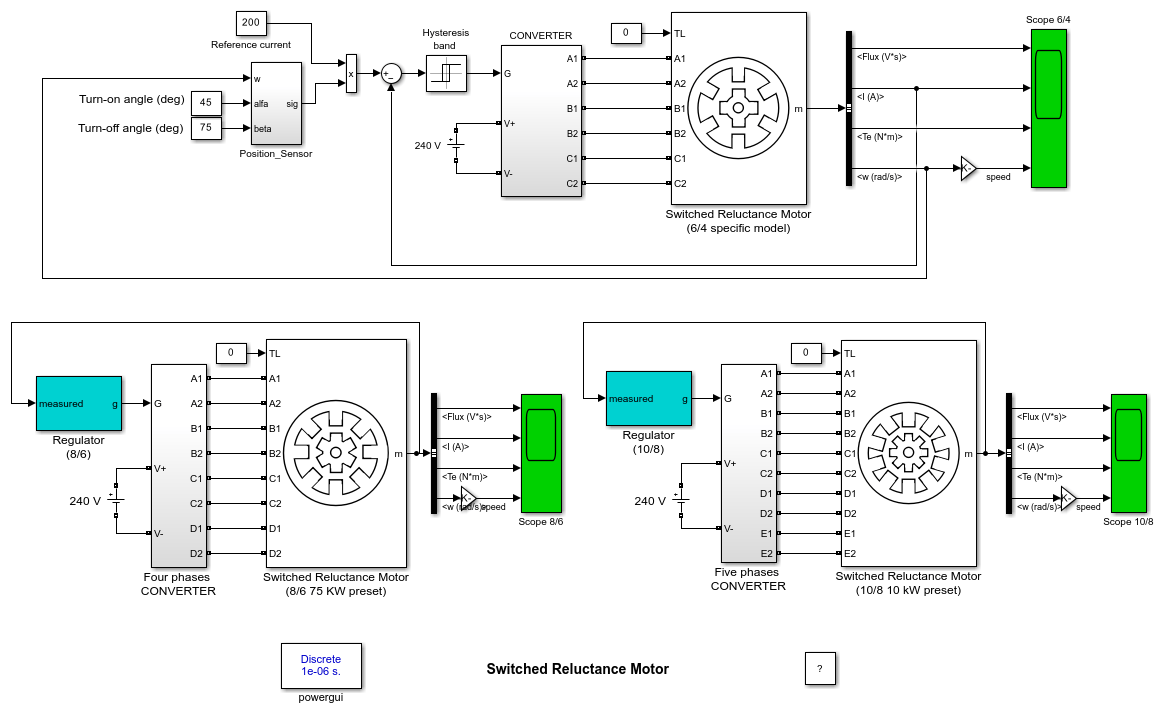
This example shows a current-controlled 60-kW 6/4 SRM drive using the SRM specific model based on measured magnetization curves. 8/6 and 10/8 preset models are also presented with same control strategy.
Hoang Le-Huy, Laval University
Description (6/4 specific model)
The SRM is fed by a three-phase asymmetrical power converter having three legs, each of which consists of two IGBTs and two free-wheeling diodes. During conduction periods, the active IGBTs apply positive source voltage to the stator windings to drive positive currents into the phase windings. During free-wheeling periods, negative voltage is applied to the windings and the stored energy is returned to the power DC source through the diodes. The fall time of the currents in motor windings can be thus reduced. By using a position sensor attached to the rotor, the turn-on and turn-off angles of the motor phases can be accurately imposed. These switching angle can be used to control the developed torque waveforms. The phase currents are independently controlled by three hysteresis controllers which generate the IGBTs drive signals by comparing the measured currents with the references. The IGBTs switching frequency is mainly determined by the hysteresis band.
Simulation (6/4 specific model)
In this example, a DC supply voltage of 240 V is used. The converter turn-on and turn-off angles are kept constant at 45 deg and 75 deg, respectively, over the speed range. The reference current is 200 A and the hysteresis band is chosen as +-10 A. The SRM is started by applying the step reference to the regulator input. The acceleration rate depends on the load characteristics. To shorten the starting time, a very light load was chosen. Since only the currents are controlled, the motor speed will increase according to the mechanical dynamics of the system. The SRM drive waveforms (phase voltages, magnetic flux, windings currents, motor torque, motor speed) are displayed on the scope. As can be noted, the SRM torque has a very high torque ripple component which is due to the transitions of the currents from one phase to the following one. This torque ripple is a particular characteristic of the SRM and it depends mainly on the converter s turn-on and turn-off angles. In observing the drive's waveforms, we can remark that the SRM operation speed range can be divided into two regions according to the converter operating mode: current-controlled and voltage-fed.
Current-controlled mode
From stand still up to about 3000 rpm, the motor's emf is low and the current can be regulated to the reference value. In this operation mode, the average value of the developed torque is approximately proportional to the current reference. In addition to the torque ripple due to phase transitions, we note also the torque ripple created by the switching of the hysteresis regulator. This operation mode is also called constant torque operation.
Voltage-fed mode
For speeds above 3000 rpm, the motor's emf is high and the phase currents cannot attain the reference value imposed by the current regulators. The converter operation changes naturally to voltage-fed mode in which there is no modulation of the power switches. They remain closed during their active periods and the constant DC supply voltage is continuously applied to the phase windings. This results in linear varying flux waveforms as shown on the scope. In voltage-fed mode, the SRM develops its 'natural' characteristic in which the average value of the developed torque is inversely proportional to the motor speed. Since the hysteresis regulator is inactive in this case, only torque ripple due to phase transitions is present in the torque waveforms.
Optimization of the Torque Characteristic - Adaptive Switching Angle
In SRM drives, both the average torque and torque ripple are affected by the turn-on and turn-off angles and by the current waveforms in the motor phases. And these characteristics change as a function of the motor speed. In many applications, electric vehicle drives for instance, it is highly desirable to have highest torque/ampere ratio and lowest torque ripple and this over a widest speed range possible. The SRM torque characteristic can be optimized by applying appropriated pre-calculated turn-on and turn-off angles in function of the motor current and speed. The optimum values of optimum angles can be stored in a 2-D lookup table.