矩阵旋转和变换
此示例说明了如何使用 Symbolic Math Toolbox™ 和矩阵在三维空间中进行旋转和变换。
定义并绘制参数曲面
按如下所示定义参数曲面 x(u,v)、y(u,v)、z(u,v)。
syms u v x = cos(u)*sin(v); y = sin(u)*sin(v); z = cos(v)*sin(v);
使用 fsurf 绘制曲面。
fsurf(x,y,z)
axis equal
创建旋转矩阵
创建 3×3 矩阵 Rx、Ry 和 Rz,分别表示绕 x 轴、y 轴和 z 轴旋转 t 度的平面旋转。
syms t
Rx = [1 0 0; 0 cos(t) -sin(t); 0 sin(t) cos(t)]Rx =
Ry = [cos(t) 0 sin(t); 0 1 0; -sin(t) 0 cos(t)]
Ry =
Rz = [cos(t) -sin(t) 0; sin(t) cos(t) 0; 0 0 1]
Rz =
在三维空间中绕每个轴旋转
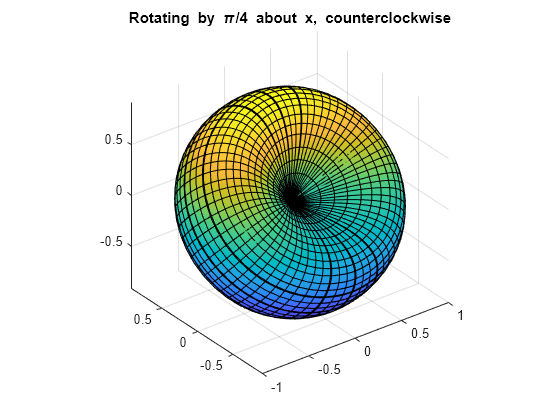
首先,将曲面绕 x 轴逆时针旋转 45 度。
xyzRx = Rx*[x;y;z]; Rx45 = subs(xyzRx, t, pi/4); fsurf(Rx45(1), Rx45(2), Rx45(3)) title('Rotating by \pi/4 about x, counterclockwise') axis equal
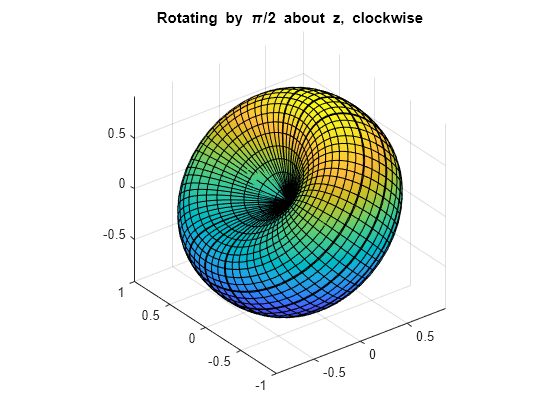
绕 z 轴顺时针旋转 90 度。
xyzRz = Rz*Rx45; Rx45Rz90 = subs(xyzRz, t, -pi/2); fsurf(Rx45Rz90(1), Rx45Rz90(2), Rx45Rz90(3)) title('Rotating by \pi/2 about z, clockwise') axis equal
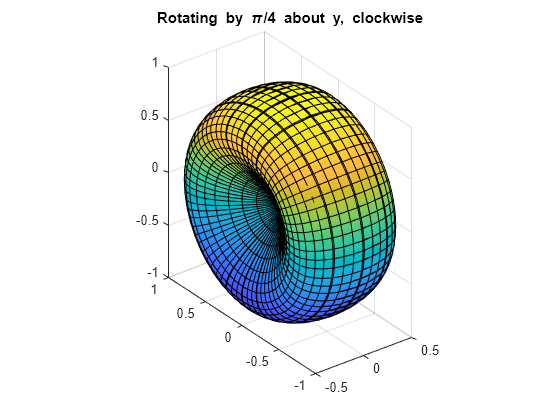
绕 y 轴顺时针旋转 45 度。
xyzRy = Ry*Rx45Rz90; Rx45Rz90Ry45 = subs(xyzRy, t, -pi/4); fsurf(Rx45Rz90Ry45(1), Rx45Rz90Ry45(2), Rx45Rz90Ry45(3)) title('Rotating by \pi/4 about y, clockwise') axis equal
缩放和旋转
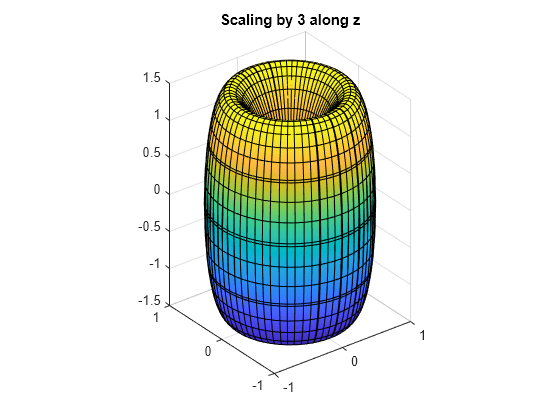
沿 z 轴将曲面拉伸 3 倍。可以将表达式 z 乘以 3,即 z = 3*z。更通用的方法是创建一个缩放矩阵,然后将缩放矩阵与坐标向量相乘。
S = [1 0 0; 0 1 0; 0 0 3]; xyzScaled = S*[x; y; z]
xyzScaled =
fsurf(xyzScaled(1), xyzScaled(2), xyzScaled(3)) title('Scaling by 3 along z') axis equal
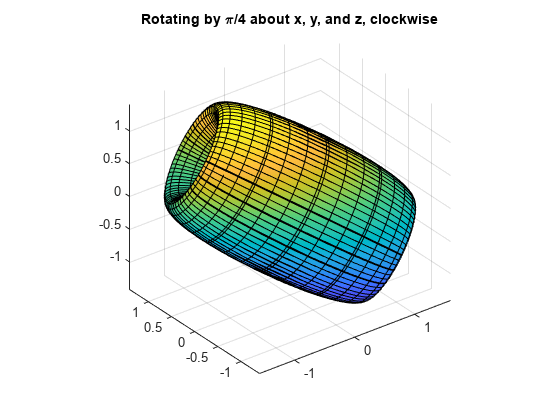
按 z 轴、y 轴、x 轴的顺序,将缩放后的曲面绕 x 轴、y 轴和 z 轴顺时针旋转 45 度。该变换的旋转矩阵如下。
R = Rx*Ry*Rz
R =
使用该旋转矩阵求出新的坐标。
xyzScaledRotated = R*xyzScaled; xyzSR45 = subs(xyzScaledRotated, t, -pi/4);
绘制曲面。
fsurf(xyzSR45(1), xyzSR45(2), xyzSR45(3)) title('Rotating by \pi/4 about x, y, and z, clockwise') axis equal
检查旋转矩阵 R 的性质
旋转矩阵是正交矩阵。因此,R 的转置矩阵即是其逆矩阵,并且 R 的行列式为 1。
simplify(R.'*R)
ans =
simplify(det(R))
ans =