MCU 上 C2000 多处理器模块入门
本示例展示了如何使用 C2000™ Microcontroller Blockset 在 MCU 上仿真和部署闭环反馈控制算法。
C2000 Blockset 允许您创建一个闭环模型,该模型由被控对象、在微控制器上运行的算法以及将微控制器与被控对象连接的硬件外设组成。利用以下功能,您可以轻松创建系统的高保真仿真:
对具有精确实时性能的 ADC 和 PWM 外设进行建模
将中断建模为包括同步和调度在内的任务
由于执行延迟和传感器延迟导致的模型任务延迟
本示例展示了如何使用 C2000 Blockset 将闭环应用程序的 Simulink 模型部署到 TI Delfino F28379D LaunchPad 上。
支持的硬件平台:
TI Delfino F28379D LaunchPad
基于 TI Delfino F2837xD 的开发板
使用 C2000 Blockset 的模型
打开 soc_closed_loop.slx 模型。
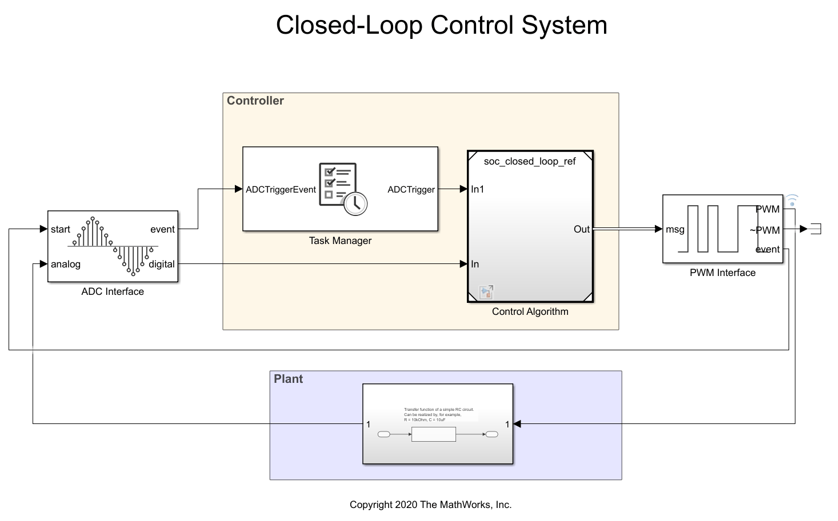
打开 soc_closed_loop.slx 闭环模板模型。该模型展示了一个以低通滤波器为被控对象的基本闭环控制应用。ADC Interface 对工厂的输出进行采样,并在每次转化时生成一个事件。Task Manager 在收到每个 ADC 转换结束事件时执行一个名为 ADC 的事件驱动任务。ADC 中断任务包含反馈控制算法,该算法异步执行以响应每个 ADC 转换事件。控制算法通过 ADC 读取接收反馈,并为 PWM Write 模块生成占空比值。PWM Interface 模块仿真 PWM 行为,包括触发事件以开始下一次 ADC 转换。
点击“播放”按钮仿真模型。打开仿真数据检查器并查看信号。在尝试部署之前,先在仿真中验证模型。该图显示了由 PWM Interface 模块生成的控制器响应和开关 PWM。您可以通过调节 PID Controller 模块中的增益值来调节 PI 控制器参数。

在 MCU 上部署和运行 TI C2000 模型
您可以利用简单的 RC 电路,从仿真中创建一阶被控对象模型。假设 RC 电路输出端没有负载,则可以使用 R = 10kΩ 和 C = 10μF。如图所示,将选定的 EPWM1A 的输出端(F28379D Launchpad 的 J4 引脚 40)与 ADCINA0 的 J3 引脚 30 连接起来。

您可以按照以下分步说明和指南,直接将模型部署到 TI Delfino F28379D LaunchPad 上。
从 System on Chip 选项卡中打开SoC 构建器工具,点击 Configure, Build, & Deploy。
请查看下一页的硬件映射图。注意 ADCA1_isr 已配置为控制任务的事件源。
下一页将介绍 MCU 模型中的外设映射。配置外设使用与仿真相同的值。
Validate Model 页面确保模型无误。若模型编译步骤失败,请尝试从调试选项卡中执行更新模型(Ctrl+D)。
要监控硬件数据,请在 Select Build Action 页面中选择 Build and load for External mode。在下一页中,点击加载并运行。打开仿真数据检查器,查看来自硬件的信号。
要分析处理器上的任务执行情况,请打开控制器参考模型,然后选择要在 SDI 中显示的探查信息。在 Select Build Action 页面中选择 Build and load for External mode。在下一页中,点击加载并运行。打开仿真数据检查器,查看来自硬件的任务探查数据。