DC-DC 降压转换器的闭环控制
本示例展示了如何在 C2000™ Microcontroller Blockset 中对 DC-DC 降压转换器进行闭环控制建模。该模型运行在连接到 C2000 数字电源增强包的 F28379D Launchpad 上。
利用这个示例,您可以进行以下建模:
数字式直流-直流同步降压转换器电压模式控制 (VMC)。
数字 DC-DC 同步降压转换器采用控制律加速器 (CLA) 实现平均电流模式控制。
通过在主机上运行本示例中提供的模型,您可以:
对直流-直流降压转换器系统模型进行控制器仿真。
为控制器生成代码并将其加载到 LaunchPad 上。
在主机上监控信号并调节参数。
所需硬件
硬件连接
按照下表中的详细说明,将数字电源降压转换器 BoosterPack (BOOSTXL-BUCKCONV) 连接到 Texas Instruments Delfino F28379D LaunchPad 和 Texas Instruments F28P650D LaunchPad。

可用模型
目标模型可用于仿真控制器、生成代码并将其加载到所需的目标上。主机模型可以在主机上运行,以记录信号和调节参数。
F28379D LaunchPad
目标模型:
主机模型:
F28P650D LaunchPad
目标模型:
主机模型:
这些模型既可用于仿真,也可用于代码生成。
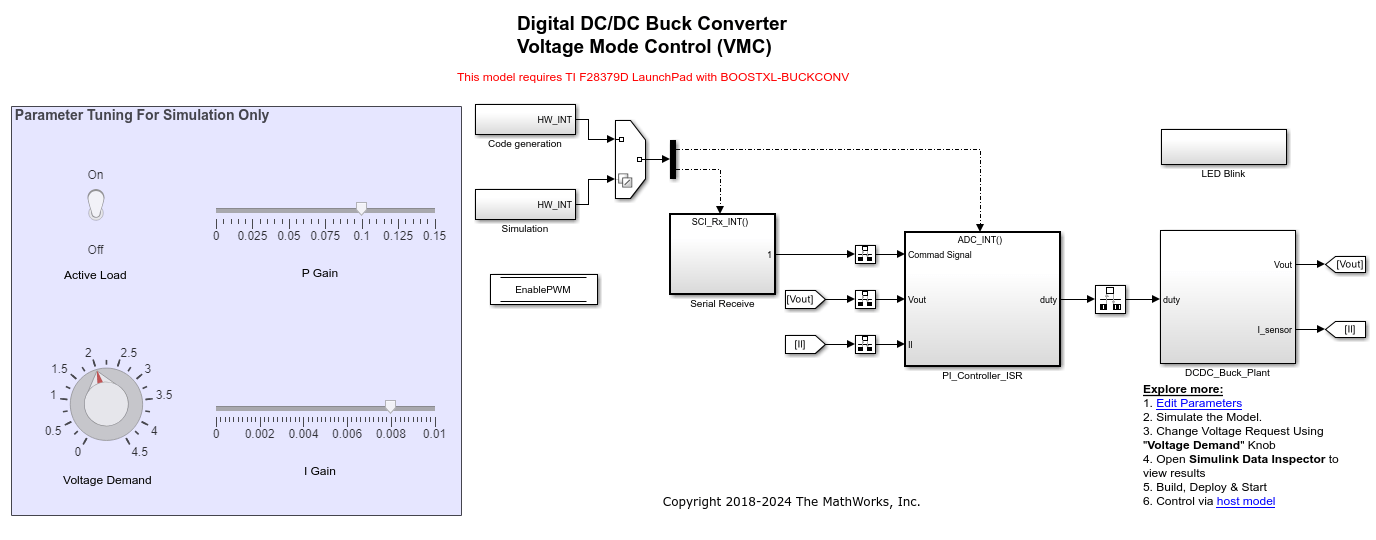
f28379D_DCDC_Buck.slx 和 f28379D_DCDC_Buck_CLA.slx 模型由以下子系统组成:
控制器:
电压模式控制 - f28379D_DCDC_Buck.slx 模型采用离散比例积分 (PI) 控制器来最小化参考电压和输出电压之间的误差。PI 控制器的占空比限制为 PWM 时间周期的 60%。
平均电流模式控制 - f28379D_DCDC_Buck_CLA.slx 模型采用离散比例积分 (PI) 控制器来控制平均电感电流,从而产生占空比。当前控制器参考值是电压控制器的输出。
DC-DC 降压转换器:Simscape™ 模块用于对 DC-DC 降压转换器电路进行建模。
仪表盘控件:用于设置参考电压、打开和关闭有源负载以及调节比例增益和积分增益。
外设模块配置
设置此模型的外围模块配置。双击模块即可打开模块参数配置。如果想在其他硬件板上运行此示例,可以使用相同的参数值。所示外围模块配置适用于 f28379D_DCDC_Buck_CLA.slx 模型。
ePWM 模块
ePWM 模块(位于 PI_Controller_ISR > 代码生成 > PI 算法中)配置为以向上模式运行,当 ePWM 计数器达到定时器周期时,它会触发 ADC 转换的开始。

ADC 模块
ADC 模块(在 PI_Controller_ISR > 代码生成 > PI 算法中)配置为启用 EOC 触发后中断参数。

CLA Subsystem 模块
PI 算法模块的输入存储在 CpuToCla1MsgRAM 中。CLA 配置仅适用于 f28379D_DCDC_Buck_CLA.slx 模型。有关更多信息,请参阅 Overview of CLA Configuration for C2000 Processors Using Subsystem。

仿真直流/直流降压变换器系统模型的控制器
运行模型
1.打开 f28379D_DCDC_Buck.slx 或 f28379D_DCDC_Buck_CLA.slx 模型。
2.点击仿真选项卡上的运行按钮以仿真模型。
3.点击仿真选项卡上的数据检查器以查看和分析仿真结果。您可以使用仪表盘控件调节输入参数。
生成控制器代码并将其加载到 LaunchPad 上
在本节中,您将生成代码并将其加载到目标硬件上。
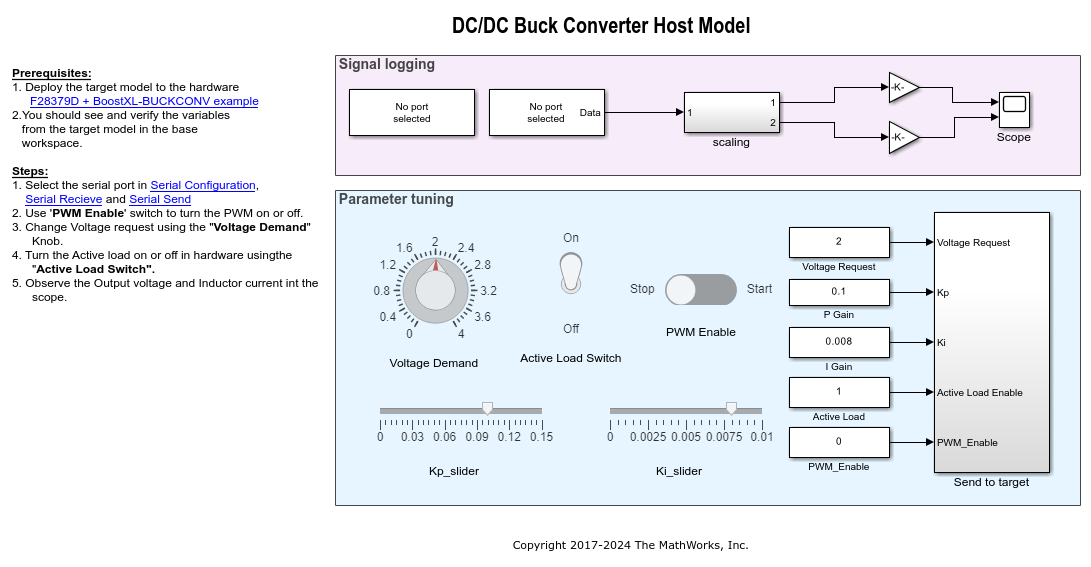
本示例使用主机模型和目标模型。主机模型是控制器硬件板的用户界面。您可以在主机上运行主机模型。使用主机模型的前提条件是将目标模型部署到控制器硬件板上。主机模型使用串行通信来命令目标 Simulink® 模型,并在闭环控制中运行 BoostXL-BUCKCONV。
在 LaunchPad 上运行模型
1.打开 f28379D_DCDC_Buck.slx 或 f28379D_DCDC_Buck_CLA.slx 模型,然后按 Ctrl+B 或点击构建、部署和启动在硬件选项卡上生成代码,将目标模型部署到硬件。
注意:在 F28379D 处理器上,此示例在 CPU1 上运行。确保在 CPU2 上运行的程序没有使用 CPU1 正在使用的外围设备。
2.点击目标模型中的主机模型超链接,打开关联的主机模型。打开 c2000_DCDC_Buck_host_model.slx 主机模型。
在主机上监控信号并调节参数
在主机上配置并运行模型
1.在主机上,浏览到设备管理器 > 端口(COM & LPT),找到 COM 端口。
2.将 c2000_DCDC_Buck_host_model.slx 模型中下列模块的参数端口设置为与主机计算机的 COM 端口匹配:
c2000_DCDC_Buck_host_model > 串行配置
c2000_DCDC_Buck_host_model > 串行接收
c2000_DCDC_Buck_host_model > 发送到目标 > 串口发送 > 串口发送
3.点击仿真选项卡上的运行按钮以运行主机模型。
4.模型运行时,您可以使用仪表板模块调节参数,例如电压需求和控制器增益。
注意:如果遇到主机和目标之间任何非实时通信,请尝试关闭 Scope 模块并运行主机模型的仿真。如果您的机器上同时运行着其他应用程序,则在上传 Scope 模块中的数据时可能会遇到延迟。
有关使用串行连接连接硬件的更多信息,请参阅 与目标硬件建立串行通信。
监控信号
模型运行时,您可以在示波器上监控以下信号:
电压 Vout_FB:测得的系统输出电压。4095 ADC 计数相当于 6.0909 V 输出电压。
电流 I_FB:流过电感器 (L1) 的实时电流。4095 个 ADC 计数相当于 6.8333 A 电感电流。
调节参数
模型运行时,您可以使用以下仪表板模块调节参数:
电压需求:改变输出电压需求。该参数是控制循环的主要请求。控制器算法将电压请求值与测量的输出电压进行比较,并调整 PWM 占空比以实现输出电压。
有功负载开关:使用此开关打开或关闭硬件上的活动负载。这样就可以添加一个额外的负载电阻,以研究负载电路中突变的影响。
PWM 使能:使用此滑块打开或关闭同步降压转换器的 PWM。
控制器增益:使用可用的 Slider 模块(Kp_slider 和 Ki_slider)更改控制器增益(Kp 和 Ki 值)。您可以更改此参数来研究控制器的鲁棒性。剧烈、突然的变化可能会导致控制器不稳定;请平稳地进行变化。
硬件结果
1.下图显示了模型 f28379D_DCDC_Buck.slx 的硬件结果。观察输出电压和电感电流。您还可以看到电压请求从 1V 变为 2V 的影响以及有源负载变化的影响。

2.下图显示了模型 f28379D_DCDC_Buck_CLA.slx 的硬件结果。观察输出电压和电感电流。您还可以看到电压请求从 1V 变为 2V 的影响以及有源负载变化的影响。

其他可以尝试的操作
在 TI Delfino F280049C LaunchPad 上运行示例并分析结果。
改变 Kp 和 Ki 值并观察结果。