Straight Maneuver Reference Generator
Description
The Straight Maneuver Reference Generator block generates accelerator and brake commands to conduct a straight line maneuver for the Braking Test. The acceleration begins at the specified rate until the vehicle achieves the longitudinal velocity setpoint. The vehicle controller maintains the longitudinal velocity setpoint for the specified time or distance. The controller then decelerates the vehicle.
Use the Maneuver Parameters to specify the maneuver start time, velocity setpoint, acceleration, and deceleration.
Optionally, on the Tracking Parameters tab, select Enable fault tracking before braking. Use the parameters to specify fault conditions before braking during a split-mu test. If the vehicle speed, steering angle, or yaw rate is not within the allowable range before braking, the block sets a fault condition. The default values represent compliance with ISO 145121.
Examples
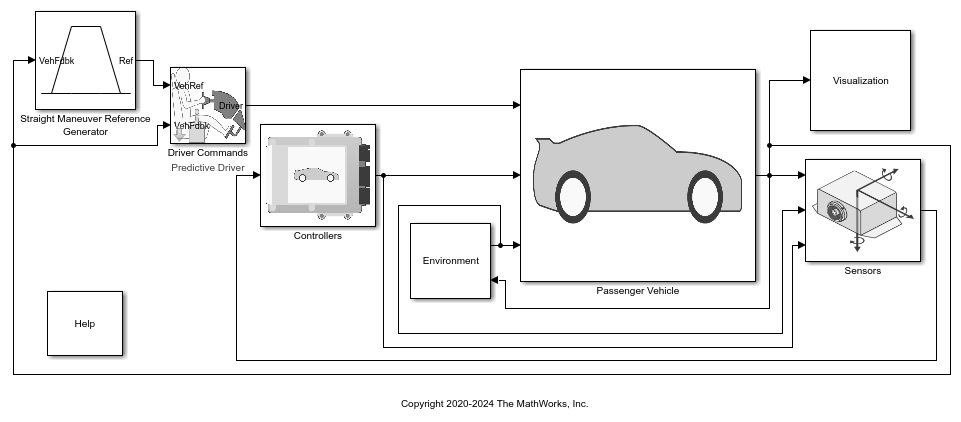
Braking Test Reference Application
Simulate a full vehicle dynamics model undergoing a braking test. Use for vehicle dynamics ride and handling analysis and chassis controls development, including the dynamic response to split-mu tests.
Ports
Input
Output
Parameters
Version History
Introduced in R2021a