Three-axis Inertial Measurement Unit
Implement three-axis inertial measurement unit (IMU)

Libraries:
Vehicle Dynamics Blockset /
Sensors
Description
The Three-Axis Inertial Measurement Unit block implements an inertial measurement unit (IMU) containing a three-axis accelerometer and a three-axis gyroscope.
For a description of the equations and application of errors, see Three-axis Accelerometer (Aerospace Blockset) and Three-axis Gyroscope (Aerospace Blockset).
Examples
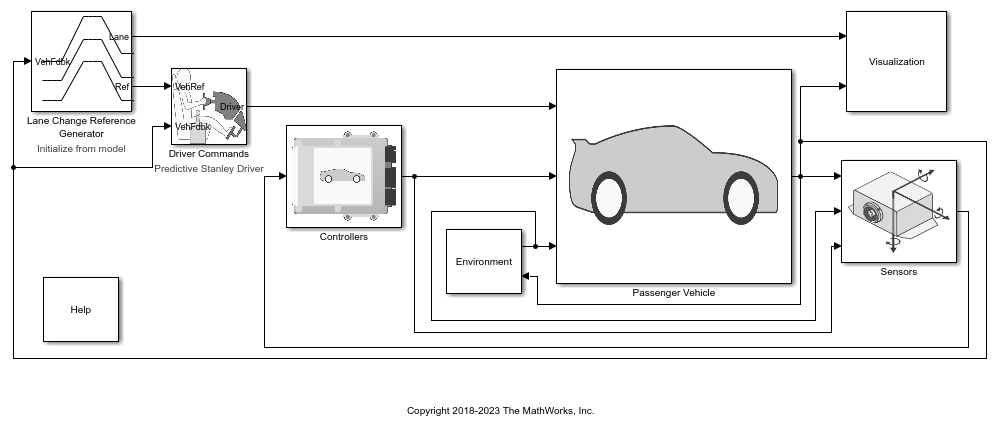
Double Lane Change Reference Application
Simulate a full vehicle dynamics model undergoing a double lane change maneuver standard ISO 3888-2. Use for vehicle dynamics ride and handling analysis and chassis controls development, including yaw stability and lateral acceleration limits.
Limitations
Vibropendulous error, hysteresis affects, anisoelastic bias and anisoinertial bias are not accounted for in this block.
This block is not intended to model the internal dynamics of different forms of the instrument.
Ports
Input
Output
Parameters
References
[1] Rogers, R. M., Applied Mathematics in Integrated Navigation Systems, AIAA Education Series, 2000.
Extended Capabilities
Version History
Introduced in R2020a
See Also
Three-axis Gyroscope (Aerospace Blockset) | Three-axis Accelerometer (Aerospace Blockset)