Monocular Visual Odometry
Visual odometry is the process of determining the location and orientation of a camera by analyzing a sequence of images. Visual odometry is used in a variety of applications, such as mobile robots, self-driving cars, and unmanned aerial vehicles. This example shows you how to estimate the trajectory of a single calibrated camera from a sequence of images.
Overview
This example shows how to estimate the trajectory of a calibrated camera from a sequence of 2-D views. This example uses images from the New Tsukuba Stereo Dataset created at Tsukuba University's CVLAB. (https://cvlab.cs.tsukuba.ac.jp). The dataset consists of synthetic images, generated using computer graphics, and includes the ground truth camera poses.
Without additional information, the trajectory of a monocular camera can only be recovered up to an unknown scale factor. Monocular visual odometry systems used on mobile robots or autonomous vehicles typically obtain the scale factor from another sensor (e.g. wheel odometer or GPS), or from an object of a known size in the scene. This example computes the scale factor from the ground truth.
The example is divided into three parts:
Estimating the pose of the second view relative to the first view. Estimate the pose of the second view by estimating the essential matrix and decomposing it into camera location and orientation.
Bootstrapping estimating camera trajectory using global bundle adjustment. Eliminate outliers using the epipolar constraint. Find 3D-to-2D correspondences between points triangulated from the previous two views and the current view. Compute the world camera pose for the current view by solving the perspective-n-point (PnP) problem. Estimating the camera poses inevitably results in errors, which accumulate over time. This effect is called the drift. To reduce the drift, the example refines all the poses estimated so far using bundle adjustment.
Estimating remaining camera trajectory using windowed bundle adjustment. With each new view the time it takes to refine all the poses increases. Windowed bundle adjustment is a way to reduce computation time by only optimizing the last n views, rather than the entire trajectory. Computation time is further reduced by not calling bundle adjustment for every view.
Read Input Image Sequence and Ground Truth
This example uses images from the New Tsukuba Stereo Dataset created at Tsukuba University's CVLAB. If you use these images in your own work or publications, please cite the following papers:
[1] Martin Peris Martorell, Atsuto Maki, Sarah Martull, Yasuhiro Ohkawa, Kazuhiro Fukui, "Towards a Simulation Driven Stereo Vision System". Proceedings of ICPR, pp.1038-1042, 2012.
[2] Sarah Martull, Martin Peris Martorell, Kazuhiro Fukui, "Realistic CG Stereo Image Dataset with Ground Truth Disparity Maps", Proceedings of ICPR workshop TrakMark2012, pp.40-42, 2012.
images = imageDatastore(fullfile(toolboxdir('vision'), 'visiondata', 'NewTsukuba')); % Load ground truth camera poses. load("visualOdometryGroundTruth.mat")
Create a View Set Containing the First View of the Sequence
Use an imageviewset object to store and manage the image points and the camera pose associated with each view, as well as point matches between pairs of views. Once you populate an imageviewset object, you can use it to find point tracks across multiple views and retrieve the camera poses to be used by triangulateMultiview and bundleAdjustment functions.
% Create an empty imageviewset object to manage the data associated with each view. vSet = imageviewset; % Read and display the first image. Irgb = readimage(images, 1); player = vision.VideoPlayer(Position=[20, 400, 650, 510]); step(player, Irgb);
% Create the camera intrinsics object using camera intrinsics from the % New Tsukuba dataset. focalLength = [615 615]; % specified in units of pixels principalPoint = [320 240]; % in pixels [x, y] imageSize = size(Irgb,[1,2]); % in pixels [mrows, ncols] intrinsics = cameraIntrinsics(focalLength, principalPoint, imageSize);
Convert to gray scale and undistort. In this example, undistortion has no effect, because the images are synthetic, with no lens distortion. However, for real images, undistortion is necessary.
prevI = undistortImage(im2gray(Irgb), intrinsics); % Detect features. prevPoints = detectSURFFeatures(prevI, MetricThreshold=500); % Select a subset of features, uniformly distributed throughout the image. numPoints = 200; prevPoints = selectUniform(prevPoints, numPoints, size(prevI)); % Extract features. Using 'Upright' features improves matching quality if % the camera motion involves little or no in-plane rotation. prevFeatures = extractFeatures(prevI, prevPoints, Upright=true); % Add the first view. Place the camera associated with the first view % at the origin, oriented along the Z-axis. viewId = 1; vSet = addView(vSet, viewId, rigidtform3d(eye(3), [0 0 0]), Points=prevPoints);
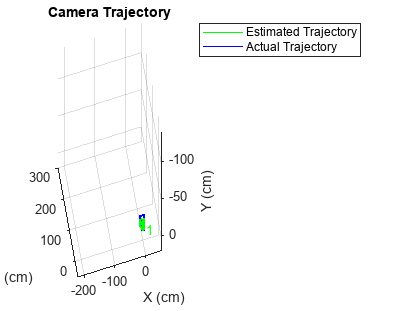
Plot Initial Camera Pose
Create two graphical camera objects representing the estimated and the actual camera poses based on ground truth data from the New Tsukuba dataset.
% Setup axes. figure axis([-220, 50, -140, 20, -50, 300]); % Set Y-axis to be vertical pointing down. view(gca, 3); set(gca, CameraUpVector=[0, -1, 0]); camorbit(gca, -120, 0, data=[0, 1, 0]); grid on xlabel('X (cm)'); ylabel('Y (cm)'); zlabel('Z (cm)'); hold on % Plot estimated camera pose. cameraSize = 7; camPose = poses(vSet); camEstimated = plotCamera(camPose, Size=cameraSize,... Color="g", Opacity=0); % Plot actual camera pose. camActual = plotCamera(Size=cameraSize, ... AbsolutePose=rigidtform3d(groundTruthPoses.Orientation{1}', ... groundTruthPoses.Location{1}), ... Color="b", Opacity=0); % Initialize camera trajectories. trajectoryEstimated = plot3(0, 0, 0, "g-"); trajectoryActual = plot3(0, 0, 0, "b-"); legend('Estimated Trajectory', 'Actual Trajectory'); title('Camera Trajectory');

Estimate the Pose of the Second View
Detect and extract features from the second view, and match them to the first view using helperDetectAndMatchFeatures. Estimate the pose of the second view relative to the first view using helperEstimateRelativePose, and add it to the imageviewset.
% Read and display the image.
viewId = 2;
Irgb = readimage(images, viewId);
step(player, Irgb);
% Convert to gray scale and undistort. I = undistortImage(im2gray(Irgb), intrinsics); % Match features between the previous and the current image. [currPoints, currFeatures, indexPairs] = helperDetectAndMatchFeatures(... prevFeatures, I); % Estimate the pose of the current view relative to the previous view. [relPose, inlierIdx] = helperEstimateRelativePose(... prevPoints(indexPairs(:,1)), currPoints(indexPairs(:,2)), intrinsics); % Exclude epipolar outliers. indexPairs = indexPairs(inlierIdx, :); % Add the current view to the view set. vSet = addView(vSet, viewId, relPose, Points=currPoints); % Store the point matches between the previous and the current views. vSet = addConnection(vSet, viewId-1, viewId, Matches=indexPairs);
The location of the second view relative to the first view can only be recovered up to an unknown scale factor. Compute the scale factor from the ground truth using helperNormalizeViewSet, simulating an external sensor, which would be used in a typical monocular visual odometry system.
vSet = helperNormalizeViewSet(vSet, groundTruthPoses);
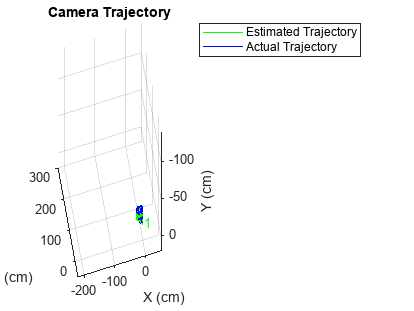
Update camera trajectory plots using helperUpdateCameraPlots and helperUpdateCameraTrajectories.
helperUpdateCameraPlots(viewId, camEstimated, camActual, poses(vSet), ... groundTruthPoses); helperUpdateCameraTrajectories(viewId, trajectoryEstimated, trajectoryActual,... poses(vSet), groundTruthPoses);
prevI = I; prevFeatures = currFeatures; prevPoints = currPoints;
Bootstrap Estimating Camera Trajectory Using Global Bundle Adjustment
Find 3D-to-2D correspondences between world points triangulated from the previous two views and image points from the current view. Use helperFindEpipolarInliers to find the matches that satisfy the epipolar constraint, and then use helperFind3Dto2DCorrespondences to triangulate 3-D points from the previous two views and find the corresponding 2-D points in the current view.
Compute the world camera pose for the current view by solving the perspective-n-point (PnP) problem using estworldpose. For the first 15 views, use global bundle adjustment to refine the entire trajectory. Using global bundle adjustment for a limited number of views bootstraps estimating the rest of the camera trajectory, and it is not prohibitively expensive.
for viewId = 3:15 % Read and display the next image Irgb = readimage(images, viewId); step(player, Irgb); % Convert to gray scale and undistort. I = undistortImage(im2gray(Irgb), intrinsics); % Match points between the previous and the current image. [currPoints, currFeatures, indexPairs] = helperDetectAndMatchFeatures(... prevFeatures, I); % Eliminate outliers from feature matches. [~, inlierIdx] = helperEstimateRelativePose(prevPoints(indexPairs(:,1)),... currPoints(indexPairs(:, 2)), intrinsics); indexPairs = indexPairs(inlierIdx, :); % Triangulate points from the previous two views, and find the % corresponding points in the current view. [worldPoints, imagePoints] = helperFind3Dto2DCorrespondences(vSet,... intrinsics, indexPairs, currPoints); % Since RANSAC involves a stochastic process, it may sometimes not % reach the desired confidence level and exceed maximum number of % trials. Disable the warning when that happens since the outcomes are % still valid. warningstate = warning('off','vision:ransac:maxTrialsReached'); % Estimate the world camera pose for the current view. absPose = estworldpose(imagePoints, worldPoints, intrinsics); % Restore the original warning state warning(warningstate) % Add the current view to the view set. vSet = addView(vSet, viewId, absPose, Points=currPoints); % Store the point matches between the previous and the current views. vSet = addConnection(vSet, viewId-1, viewId, Matches=indexPairs); tracks = findTracks(vSet); % Find point tracks spanning multiple views. camPoses = poses(vSet); % Get camera poses for all views. % Triangulate initial locations for the 3-D world points. xyzPoints = triangulateMultiview(tracks, camPoses, intrinsics); % Refine camera poses using bundle adjustment. [~, camPoses] = bundleAdjustment(xyzPoints, tracks, camPoses, ... intrinsics, PointsUndistorted=true, AbsoluteTolerance=1e-12,... RelativeTolerance=1e-12, MaxIterations=200, FixedViewID=1); vSet = updateView(vSet, camPoses); % Update view set. % Bundle adjustment can move the entire set of cameras. Normalize the % view set to place the first camera at the origin looking along the % Z-axes and adjust the scale to match that of the ground truth. vSet = helperNormalizeViewSet(vSet, groundTruthPoses); % Update camera trajectory plot. helperUpdateCameraPlots(viewId, camEstimated, camActual, poses(vSet), ... groundTruthPoses); helperUpdateCameraTrajectories(viewId, trajectoryEstimated, ... trajectoryActual, poses(vSet), groundTruthPoses); prevI = I; prevFeatures = currFeatures; prevPoints = currPoints; end

Estimate Remaining Camera Trajectory Using Windowed Bundle Adjustment
Estimate the remaining camera trajectory by using windowed bundle adjustment to only refine the last 15 views, in order to limit the amount of computation. Furthermore, bundle adjustment does not have to be called for every view, because estworldpose computes the pose in the same units as the 3-D points. This section calls bundle adjustment for every 7th view. The window size and the frequency of calling bundle adjustment have been chosen experimentally.
for viewId = 16:numel(images.Files) % Read and display the next image Irgb = readimage(images, viewId); step(player, Irgb); % Convert to gray scale and undistort. I = undistortImage(im2gray(Irgb), intrinsics); % Match points between the previous and the current image. [currPoints, currFeatures, indexPairs] = helperDetectAndMatchFeatures(... prevFeatures, I); % Triangulate points from the previous two views, and find the % corresponding points in the current view. [worldPoints, imagePoints] = helperFind3Dto2DCorrespondences(vSet, ... intrinsics, indexPairs, currPoints); % Since RANSAC involves a stochastic process, it may sometimes not % reach the desired confidence level and exceed maximum number of % trials. Disable the warning when that happens since the outcomes are % still valid. warningstate = warning('off','vision:ransac:maxTrialsReached'); % Estimate the world camera pose for the current view. absPose = estworldpose(imagePoints, worldPoints, intrinsics); % Restore the original warning state warning(warningstate) % Add the current view and connection to the view set. vSet = addView(vSet, viewId, absPose, Points=currPoints); vSet = addConnection(vSet, viewId-1, viewId, Matches=indexPairs); % Refine estimated camera poses using windowed bundle adjustment. Run % the optimization every 7th view. if mod(viewId, 7) == 0 % Find point tracks in the last 15 views and triangulate. windowSize = 15; startFrame = max(1, viewId - windowSize); tracks = findTracks(vSet, startFrame:viewId); camPoses = poses(vSet, startFrame:viewId); [xyzPoints, reprojErrors] = triangulateMultiview(tracks, camPoses, intrinsics); % Hold the first two poses fixed, to keep the same scale. fixedIds = [startFrame, startFrame+1]; % Exclude points and tracks with high reprojection errors. idx = reprojErrors < 2; [~, camPoses] = bundleAdjustment(xyzPoints(idx, :), tracks(idx), ... camPoses, intrinsics, FixedViewIDs=fixedIds, ... PointsUndistorted=true, AbsoluteTolerance=1e-12,... RelativeTolerance=1e-12, MaxIterations=200); vSet = updateView(vSet, camPoses); % Update view set. end % Update camera trajectory plot. helperUpdateCameraPlots(viewId, camEstimated, camActual, poses(vSet), ... groundTruthPoses); helperUpdateCameraTrajectories(viewId, trajectoryEstimated, ... trajectoryActual, poses(vSet), groundTruthPoses); prevI = I; prevFeatures = currFeatures; prevPoints = currPoints; end

hold off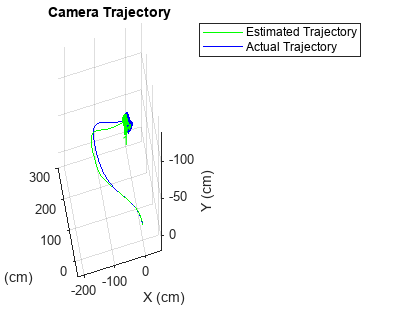
Summary
This example showed how to estimate the trajectory of a calibrated monocular camera from a sequence of views. Notice that the estimated trajectory does not exactly match the ground truth. Despite the non-linear refinement of camera poses, errors in camera pose estimation accumulate, resulting in drift. In visual odometry systems this problem is typically addressed by fusing information from multiple sensors, and by performing loop closure.
References
[1] Martin Peris Martorell, Atsuto Maki, Sarah Martull, Yasuhiro Ohkawa, Kazuhiro Fukui, "Towards a Simulation Driven Stereo Vision System". Proceedings of ICPR, pp.1038-1042, 2012.
[2] Sarah Martull, Martin Peris Martorell, Kazuhiro Fukui, "Realistic CG Stereo Image Dataset with Ground Truth Disparity Maps", Proceedings of ICPR workshop TrakMark2012, pp.40-42, 2012.
[3] M.I.A. Lourakis and A.A. Argyros (2009). "SBA: A Software Package for Generic Sparse Bundle Adjustment". ACM Transactions on Mathematical Software (ACM) 36 (1): 1-30.
[4] R. Hartley, A. Zisserman, "Multiple View Geometry in Computer Vision," Cambridge University Press, 2003.
[5] B. Triggs; P. McLauchlan; R. Hartley; A. Fitzgibbon (1999). "Bundle Adjustment: A Modern Synthesis". Proceedings of the International Workshop on Vision Algorithms. Springer-Verlag. pp. 298-372.
[6] X.-S. Gao, X.-R. Hou, J. Tang, and H.-F. Cheng, "Complete Solution Classification for the Perspective-Three-Point Problem," IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 25, no. 8, pp. 930-943, 2003.