
n-vector (geographical position calculations)

n-vector library in Matlab
Author: Kenneth Gade (PhD, principal scientist at FFI)
This library is for performing a range of different geographical position calculations, e.g. adding, subtracting, interpolating, and averaging positions. Exact results are returned for either ellipsoidal or spherical Earth model.
All calculations are based on n-vector (which can replace e.g. latitude and longitude), giving several advantages:
- The calculations are typically simple and intuitive
- Reason: n-vector is a 3D vector and hence the powerful vector algebra can be used to solve many position calculations intuitively and with few code lines.
- The calculations are non-singular (i.e. work equally well at or near the poles as any other global position)
- Reason: The n-vector representation is inherently non-singular for all Earth positions.
- The calculations have no discontinuities (i.e. work equally well across the dateline (±180° longitude meridian) as any other global positions)
- Reason: The n-vector representation has no discontinuities.
For more details and 10 examples of usage, see https://www.navlab.net/nvector
Reference:
Kenneth Gade (2010): A Non-singular Horizontal Position Representation, The Journal of Navigation, Volume 63, Issue 03, pp 395-417, July 2010, DOI: 10.1017/S0373463309990415.
https://www.navlab.net/Publications/A_Nonsingular_Horizontal_Position_Representation.pdf
Also available in several other programming languages:
There are several n-vector libraries (from other authors) available in other programming languages that are either based on this library, or based directly on the reference article (Gade, 2010). Some of these are listed below. Note: the listed code is not verified by the author of this library.
- C# (C Sharp): https://www.navlab.net/nvector/#download
- C++: https://www.navlab.net/nvector/#download
-
Python: https://github.com/pbrod/Nvector
- Alternative 2: https://github.com/mrJean1/PyGeodesy
- Alternative 3: https://github.com/lxnt/ccnvector
- JavaScript: https://github.com/chrisveness/geodesy
- Haskell: https://github.com/ofmooseandmen/jord
- Go / Google's Go / Golang: https://github.com/fortyninemaps/nvector
- R: https://github.com/euctrl-pru/nvctr
- Java: https://github.com/omeruluoglu/JGeodesy
- Rust: https://github.com/ofmooseandmen/jord-rs
Contributing
If you have suggestions or other comments to the code, please contact the author at kenneth.gade@ffi.no.
Using this code
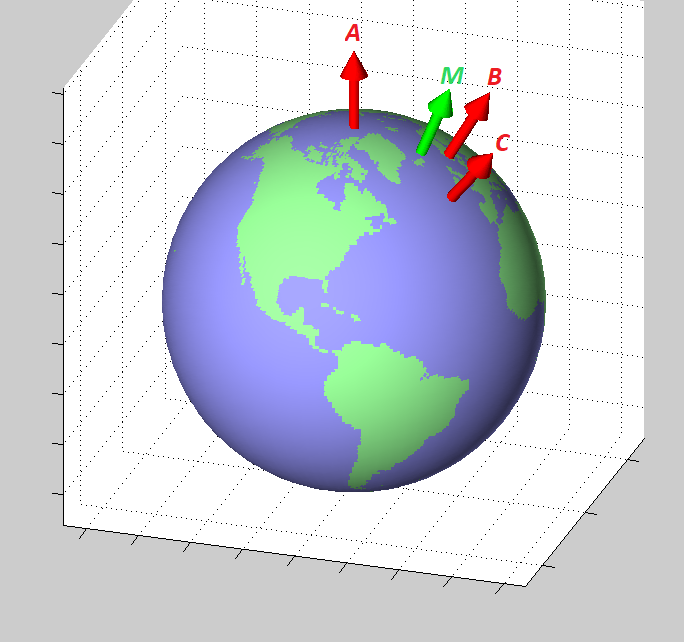
The code works with all Matlab versions (and no toolboxes are needed). A simple example of usage is Example 7 from https://www.navlab.net/nvector, where a horizontal midpoint is calculated:
% Three positions A, B and C are given as lat/long in degrees.
% Convert all three to radians and then to n-vectors:
n_EA_E = lat_long2n_E(rad(90),rad(0));
n_EB_E = lat_long2n_E(rad(60),rad(10));
n_EC_E = lat_long2n_E(rad(50),rad(-20));
% Find the horizontal mean position, M:
n_EM_E = unit(n_EA_E+n_EB_E+n_EC_E);As described below, the file examples.m includes the above solution, and it also gives the following plot:
Matlab files included
Below is a list of the files that are included in this library (19 files in total). The file name syntax, mathematical symbols and coordinate frames are defined at https://www.navlab.net/nvector.
Convert between lat/long and n-vector:
-
lat_long2n_E.mConverts latitude and longitude to n-vector -
n_E2lat_long.mConverts n-vector to latitude and longitude
Convert between delta (i.e. local position vector) and n-vectors:
-
n_EA_E_and_n_EB_E2p_AB_E.mFrom two positions A and B, finds the delta position -
n_EA_E_and_p_AB_E2n_EB_E.mFrom position A and delta, finds position B
Convert between n-vector and ECEF-vector (i.e. position vector from Earth center, in meters):
-
n_EB_E2p_EB_E.mConverts n-vector to ECEF-vector -
p_EB_E2n_EB_E.mConverts ECEF-vector to n-vector
Convert between n-vector and rotation matrix (i.e. REN or REL):
-
R_EN2n_E.mFinds n-vector from REN -
n_E2R_EN.mFinds REN from n-vector -
R_EL2n_E.mFinds n-vector from REL -
n_E_and_wa2R_EL.mFinds REL from n-vector and wander azimuth angle
Convert between Euler angles and rotation matrix:
-
xyz2R.mCreates a rotation matrix from 3 angles about new axes in the xyz order -
R2xyz.mThree angles about new axes in the xyz order are found from a rotation matrix -
zyx2R.mCreates a rotation matrix from 3 angles about new axes in the zyx order (e.g. yaw-pitch-roll) -
R2zyx.mThree angles about new axes in the zyx order (e.g. yaw-pitch-roll) are found from a rotation matrix
Miscellaneous simple utilities:
-
unit.mMakes input vector unit length (i.e. norm = 1) -
rad.mConverts angle from degrees to radians -
deg.mConverts angle from radians to degrees -
R_Ee.mSelects axes of the coordinate frame E
Examples of how to use the n-vector library for position calculations:
-
examples.mContains solutions to the 10 examples given at https://www.navlab.net/nvector
A note about the axes of coordinate frame E: This library uses the most common E-frame by default (i.e. the z-axis towards the North Pole). However, if a less common (but in many cases better) choice is preferred (with the x-axis towards the North Pole), this can be switched in the R_Ee.m-file. More details are available in the help text of this file and in Table 2 of Gade (2010).
License
This repository is available under the MIT License. See the license file for details.
Citing this code
The n-vector library is based on the following article, and hence it should be cited in publications using the library:
Kenneth Gade (2010): A Non-singular Horizontal Position Representation, The Journal of Navigation, Volume 63, Issue 03, pp 395-417, July 2010, DOI: 10.1017/S0373463309990415.
https://www.navlab.net/Publications/A_Nonsingular_Horizontal_Position_Representation.pdf
Bibtex entry as follows:
@article{gade2010non,
title={A Non-singular Horizontal Position Representation},
author={Gade, Kenneth},
journal={The Journal of Navigation},
volume={63},
number={3},
pages={395--417},
year={2010},
url={https://www.navlab.net/Publications/A_Nonsingular_Horizontal_Position_Representation.pdf},
doi={10.1017/S0373463309990415},
publisher={Cambridge University Press}
}
引用格式
Kenneth Gade (2024). n-vector (geographical position calculations) (https://github.com/FFI-no/n-vector), GitHub. 检索来源 .
MATLAB 版本兼容性
平台兼容性
Windows macOS Linux标签
Community Treasure Hunt
Find the treasures in MATLAB Central and discover how the community can help you!
Start Hunting!nvector
无法下载基于 GitHub 默认分支的版本
| 版本 | 已发布 | 发行说明 | |
|---|---|---|---|
| 1.0.0 |
|
您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)