Nonlinear Model-Based Adaptive Robust Controller in an Oil and Gas Wireline Operation
Fanping Bu, Schlumberger
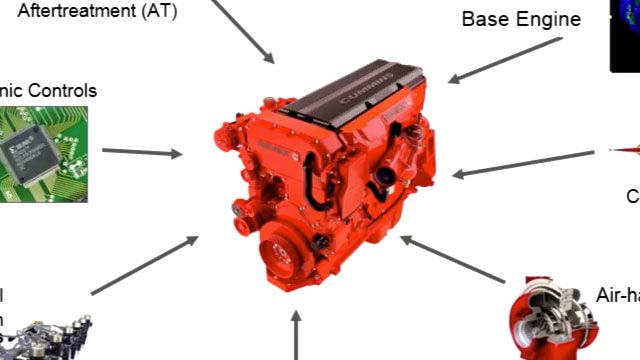
This talk presents the design and implementation of a nonlinear model-based adaptive robust controller (ARC) for tool motion control, driven by a hydrostatic transmission used in an oil and gas wireline operation. A detailed physical system model was built for controller design and testing. The ARC controller was designed to address both parametric uncertainties and uncertain nonlinearities inherent in the nonlinear system dynamics. The controller software development and testing followed a Model-Based Design procedure. A microservice architecture based on Docker containers was adopted for the controller software which facilitated continuous integration and deployment. The preliminary testing results show the effectiveness of the ARC controller design.
Published: 21 Nov 2021
Featured Product