"Control of Mobile Robots" Courseware
Course Materials Include:
- Syllabus
- Lab manual
- 7 software labs
Control of Mobile Robots
Professor Magnus Egerstedt
J.P. de la Croix
Electrical and Computer Engineering
Georgia Institute of Technology
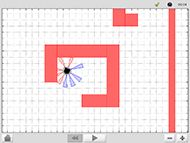
Sim.I.am is a robotics simulator, used as an educational bridge between theory and practice in the Control of Mobile Robots MOOC, which can be used to learn how to apply controls to mobile robots. The app is a demo of a multi-agent application, where one robot follows the other robot through a cluttered environment. On-screen instructions are included. A manual is included to help learn how to work with the simulator. It also provides a set of programming exercises focused on how to implement the mobile robot navigation system (found in the app) from scratch.
Learning Outcomes
Upon successful completion of the course, students will be able to select, design, analyze, implement, and evaluate effective controllers for a number of different robotics platforms and applications.
Download free course materials for Control of Mobile Robots from Georgia Institute of Technology.

This work is licensed under a Creative Commons Attribution-ShareAlike 3.0 Unported License.