验证重载列车的新型分布式制动算法的硬件在环测试
作者 : 西南交通大学 张吉烈博士
“通过桌面仿真和随后的 HIL 测试快速验证控制实现和更改的能力,使我们的整个设计过程比传统方法更快、更高效、更具成本效益。”
几十年前,当电子控制气动 (ECP) 铁路制动系统被提出时,它解决了传统空气制动系统的几个缺点。传统的制动系统依赖于列车制动管传播的空气压力产生制动力,这种方式存在制动延迟、制动力不均匀和显著的纵向冲击等问题,这些问题增加了车钩力并延长了制动距离。ECP 制动系统通过使用电信号同时激活所有车厢的制动器来解决这些问题。
通过电信号同时激活所有车厢的制动器标志着一个重大进步,但 ECP 也有其自身的缺点。它缺乏自适应性,无论车厢载重和地形如何变化,均施加相同的制动力。一种称为围栏控制的策略——将列车分成多个分组(或“围栏”)并对每个分组独立施加不同的制动力——这种方式可以有所帮助,但需要大量通信带宽来管理发送到不同列车分组的信号。综合来看,这些挑战不仅限制了速度和载重量,还可能影响重载列车的可靠性和安全性。
在西南交通大学信息科学与技术学院,我们开发了一种新型分布式协同制动控制系统,解决了ECP 系统的许多基本限制。通过这种分布式设计,每个车厢都配备了自己的微控制器,解决了带宽和通信问题,并能够根据特定车厢特性和当前地形计算自适应制动力。由于在重达80吨或以上的真实列车上测试该系统既不安全又成本高昂,我们使用 MATLAB® 和 Simulink® 通过仿真和硬件在环 (HIL) 测试验证了系统的控制算法(图1)。通过桌面仿真和随后的 HIL 测试快速验证控制实现和更改的能力,使我们的整个设计过程比传统方法更快、更高效、更具成本效益。

图1. HIL 测试设置,包括示波器、气缸、进气和排气阀以及 STM32 控制板。
建立列车动力学模型并运行桌面仿真
在使用我们的控制算法运行任何闭环仿真之前,我们首先需要一个列车动力学模型。对于项目的这一部分,一开始我们使用了一个第三方计算机辅助工程 (CAE) 软件包进行列车动力学建模。我们发现该软件包不便于控制算法开发、硬件部署和 HIL 测试,随后更换使用MATLAB实现。
在 MATLAB 中,我们使用200多个常微分方程 (ODE) 进行列车动力学建模。这些 ODE 的关键参数包括列车速度和每节车厢的载重。为了验证我们的 MATLAB 实现,我们将该结果与 CAE 软件包产生的结果进行了比较。
接下来,我们在 Simulink 中创建了一个系统模型,使用 MATLAB Function 模块将MATLAB 列车动力学模型和控制算法结合起来。我们通过 Simulink Coder™ 成功地将控制算法部署在 STM32 Nucleo 控制板上。我们使用该系统模型进行了大量的仿真,改变内部参数,如列车车厢载重,以及外部条件,如轨道坡度和曲率。我们用 MATLAB 可视化仿真结果,包括控制算法产生的牵引力和制动力(图2),以及制动时的速度(图3)和车钩力(图4)。仿真结果不仅验证了算法的功能逻辑,还为控制设计的改进提供了信息。事实上,通过 MATLAB 批量生成 ODE 图和其他图表的能力使我们的整体效率提高了80%。

图2. 重载列车在起伏条件下的制动力控制曲线。
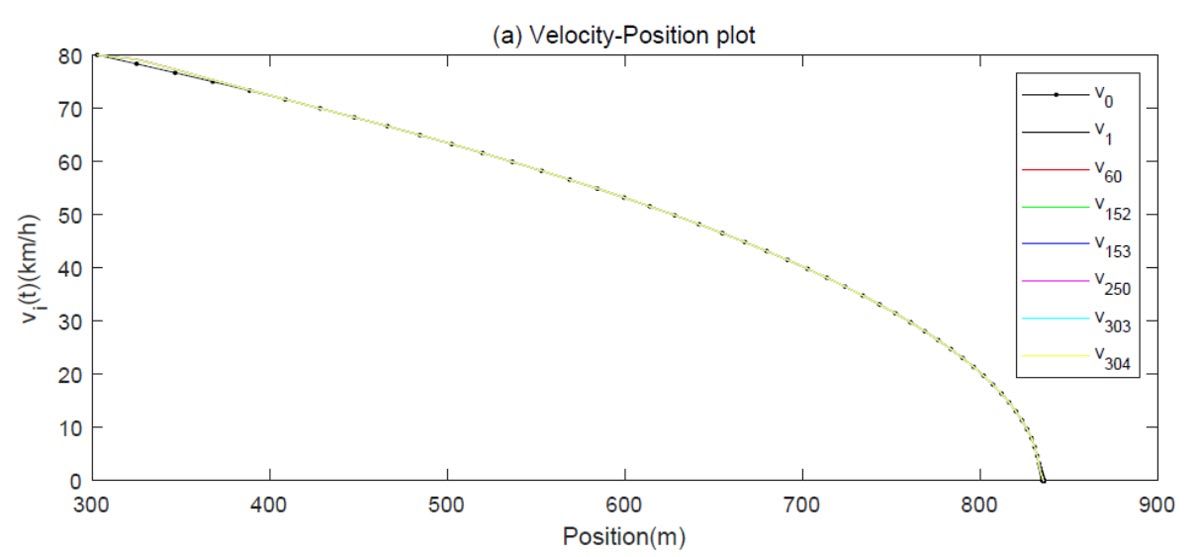
图3. 长距离下坡制动速度(载重:30,000吨,初始速度80 km/h)。
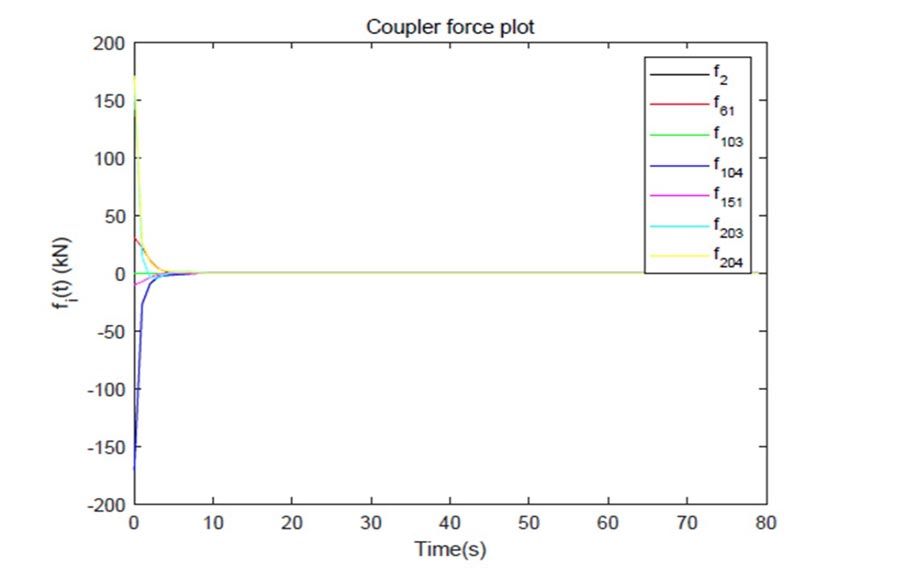
图4. 长距离下坡制动的车钩力(载重:20,000吨,初始速度120 km/h)。
通过 HIL 测试验证实时性能
一旦我们对控制算法的基本功能感到满意,并通过桌面仿真进行了验证,我们就准备开始实时HIL 测试。在项目的这个阶段,我们使用 Simulink Desktop Real-Time™ 在笔记本电脑上运行嵌入 MATLAB Function 模块的 Simulink 列车模型。我们使用 STMicroelectronics Nucleo 支持包将控制模型部署到 STMicroelectronics® STM32 Nucleo 板上。笔记本电脑和 STM32 板通过串行 USB 连接,板子直接连接到制动气缸的电磁进气和排气阀。
使用此 HIL 设置运行测试时,我们监测了制动过程中在各种场景下制动气缸空气压力的变化,并观察了进气和排气阀的动作。虽然我们的桌面仿真主要关注控制器的基本功能及其制动力输出,但我们的 HIL 测试则专注于控制器的实时性能及其与真实硬件的集成,特别是 k控制电磁阀的开关状态。在模拟列车运行期间观察压力变化和实时阀门动作的能力为控制器在现实条件下的表现提供了物理级验证洞察。
下一步
我们使用 MATLAB、Simulink 和 Simulink Desktop Real-Time 构建的 HIL 测试平台,使我们能够证明我们的分布式协同制动算法在实时操作环境中功能上是可靠的。随着我们继续完善和改进算法,我们也计划改进仿真和 HIL 环境。例如,我们正在探索如何扩展 Simulink 与 Simscape™ 的使用,利用电惯量模拟列车运动状态,并最终建立一个物理台架来模拟列车运动。
2025 年发布