Simulink GNC 软件助力帕克太阳探测器向阳前行
作者 Greg Drayer Andrade, MathWorks
2018 年 11 月 5 日,星期一,帕克太阳探测器 (PSP) 到达其首个近日点,成为有史以来距离太阳表面最近的航天器(图 1)。即使以大约每小时 213,200 英里的最高速度飞行,该探测器也要花上数天时间,才能绕经太阳并出现在另一侧。与此同时,NASA 和约翰霍普金斯大学应用物理实验室 (JHU APL) 的研究人员和工程师正在急切地等待着第一个状态信标。11 月 7 日,星期三,他们收到了信号:帕克太阳探测器处于“A 级”状态,所有科学仪器都在正常运行并收集数据。

图 1. 帕克太阳探测器接近太阳表面的假想图。JHU APL 供图。
之后不到两周,帕克太阳探测器完全恢复了与地面的联系。随着子系统状态检查的进行,APL 团队愈发欣喜。科学记录仪完成了预期任务,探测器位于正确的轨道,并且姿态稳定。在为期将近七年的任务中,帕克太阳探测器将绕日飞行 24 圈,在七次飞掠金星的过程中经引力弹弓变轨逐渐接近太阳,直到进入距离太阳表面仅 383 万英里的范围内,从而穿越太阳大气层(图 2)。
确认帕克太阳探测器首次成功飞掠太阳后,负责开发探测器姿态控制算法的 JHU APL 制导、导航和控制 (GNC) 团队尤为振奋。他们使用 Simulink® 设计、实现和验证这些对任务成败至关重要的算法:算法不仅控制探测器的方向,还使其碳复合热防护系统 (TPS) 始终朝向太阳。如果 TPS 定向稍有偏差,哪怕只是一到两度,任务就可能以探测器烧毁告终。
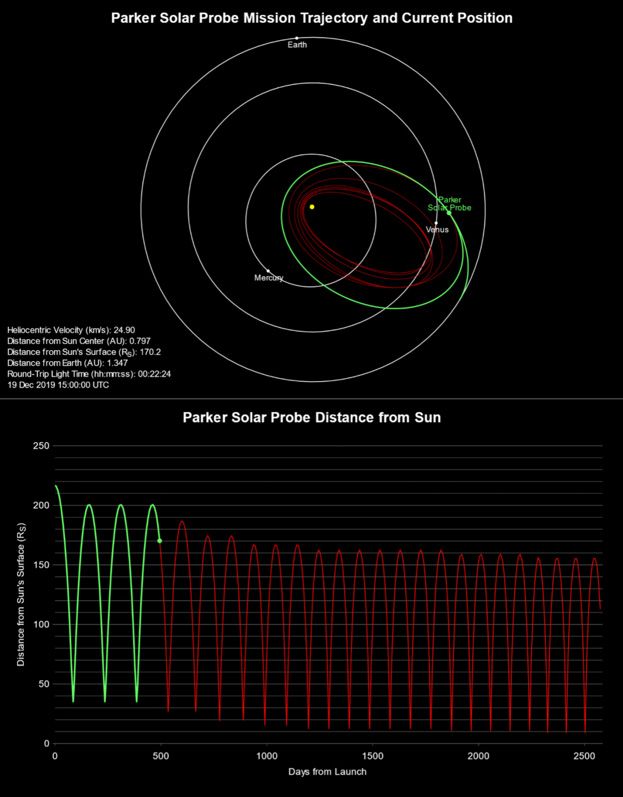
图 2. 该图显示帕克太阳探测器任务的计划路径以及相对太阳的距离。JHU APL供图。
制导与控制设计约束
相比绕地轨道,在绕日轨道上,帕克太阳探测器承受的太阳强度要高出 475 倍。因此,姿态控制系统必须对帕克太阳探测器进行定向,确保它始终处在 TPS 的保护之下。
由于太阳是太阳系中最大、最明亮的物体,让探测器朝向太阳似乎轻而易举。但实际上,帕克太阳探测器的姿态控制非常复杂。挑战之一在于,在近日点附近,为姿态控制算法提供输入数据的传感器实际上均不朝向太阳。相反,为保护这些传感器免受太阳热辐射损坏,它们全都置于 TPS 背后(图 3)。
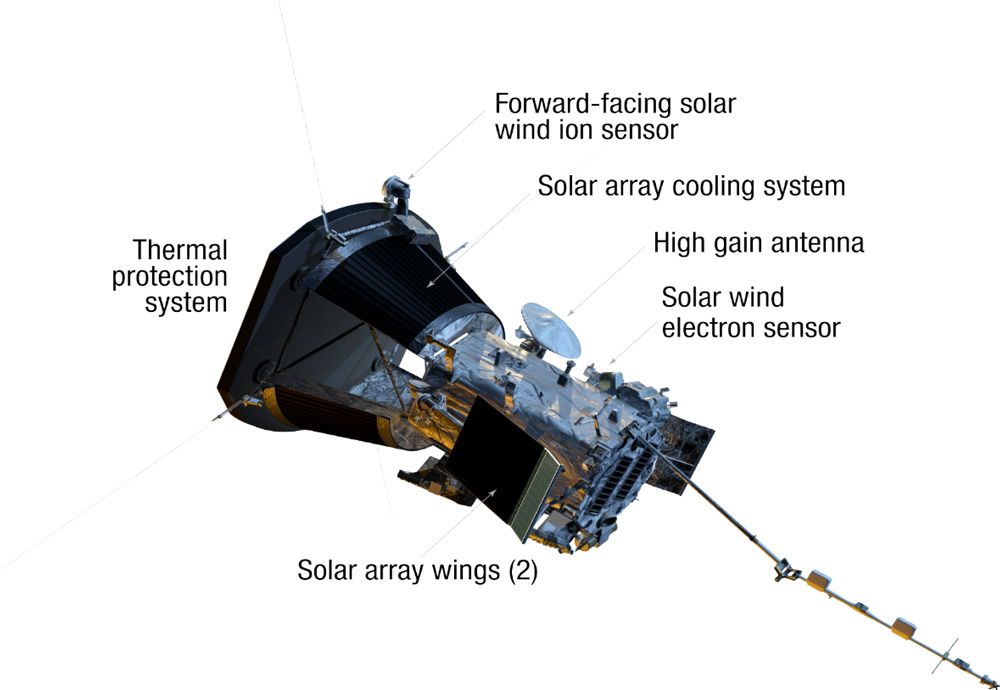
图 3. 帕克太阳探测器。JHU APL 供图。
对此,可以使用两个指向背离太阳的星体跟踪器来测量相对于星体位置的朝向,但是设计团队必须设法应对传感器在近日点附近可能失灵的问题。该探测器配备了两个数字太阳传感器 (DSS),但只能在远离太阳的位置使用。太阳肢体传感器 (SLS) 专为近距离使用而设计,但是它们仅在探测器开始偏离其理想姿态时,才会对太阳边缘进行检测。为了针对轨道的每一段分别开发容错系统,有必要确保在探测器上放置足够的硬件,并将它们纳入控制算法。
挑战之二在于,控制算法必须消耗尽可能少的电力和推进剂进行姿态校正。由于距离太阳很近,帕克太阳探测器的太阳能电池板几乎完全处在 TPS 的遮挡下,以避免融化。如果延长电池板,则施加其上的压力会随之增加,从而产生不必要的扭矩。此外,探测器推进燃料也必须谨慎使用,以确保完成这一长达数年的任务。
开发真实模型
探测器的“真实”模型使用 MATLAB®、Simulink 和 Simscape Multibody™ 构建,本质上是一个被控对象模型,能够捕获轨道效应、物理相互作用和其他航天器动力(图 4)。
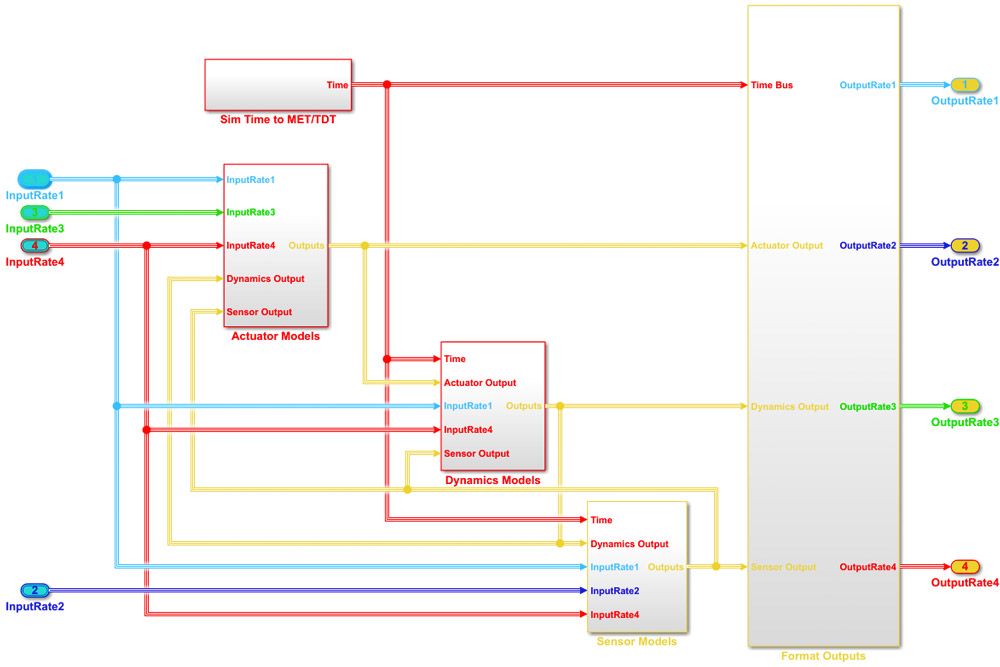
图 4. 帕克太阳探测器被控对象模型由近 1,400 个模块和 1,811 行 MATLAB 代码组成。
随着开发推进,模型中纳入了许多子系统,包括电池子系统、推进器、星体跟踪器和惯性测量单元。开发团队还对太阳能电池板和母线之间的物理连接进行了建模。模型愈发精密,而团队成员也能够运行日益精确的仿真。举例来说,他们增加了一个子系统,用于模拟推进剂晃动对航天器动力学的影响。
开发 GNC 飞行软件
最初的姿态控制系统设计未包括反作用飞轮。设计仅使用推进器来控制动量和校正姿态,这不失为一种减轻质量和降低功耗的方法。为了测试这种方法的可行性,GNC 团队对几种控制器设计进行了建模,其中一个带有脉宽脉频调制器,并使用真实模型进行了闭环仿真。虽然这些控制器设计看起来颇为可行,但如果不引入反作用飞轮,则无法保障顺利完成任务。值得庆幸的是,随着设计日趋成熟,GNC 团队能够为反作用飞轮腾出空间。这大大简化了总体设计,并提高了科学观测的准确度和稳定性。
团队创建了一个系统,该系统借助反作用飞轮实现非推进式动量管理,并在飞轮达到指定水平时启动推进器以卸载动量。在重新设计的控制器中,团队重复利用了推进器版 Simulink 模型中的大量已有设计。最终,控制器模型包含 22,000 多个模块和近 1,200 行 MATLAB 代码(图 5)。
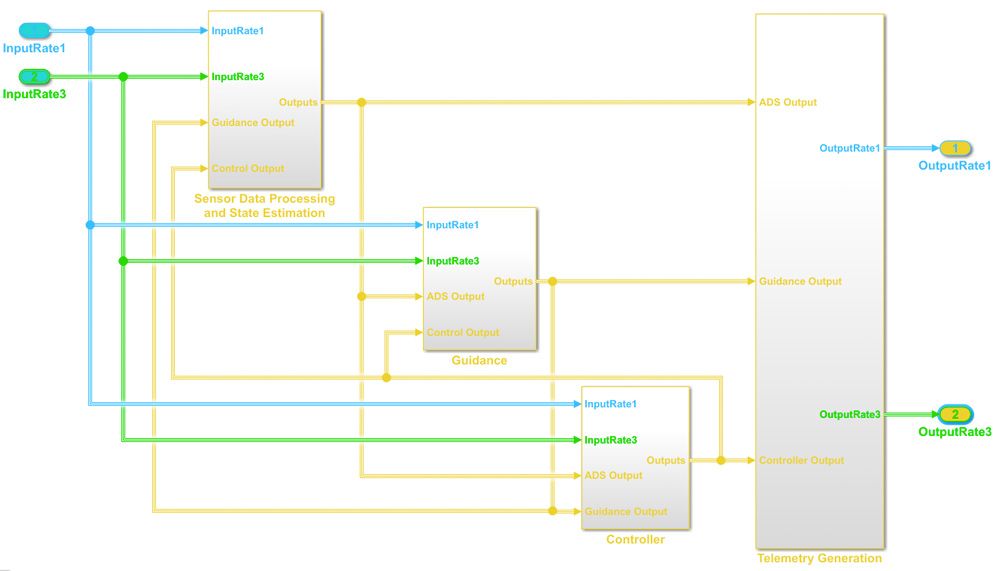
图 5. 控制器模型。
帕克太阳探测器的工作环境十分严苛,为此,团队进行了大量仿真。实际上,相比 JHU APL 以前开展的任务,形式仿真的数量提高了一个数量级不止。仿真既涵盖了动量卸载、轨道校正等常规操作,也涉及了一系列故障情形。
大多数航天器都设计为容错系统,但是就此次任务而言,太阳附近的极端状况是以往任何航天器都未曾遇到的。例如,航天器如果有一个星体跟踪器失灵,就已经属于严重故障;但对帕克太阳探测器而言,有必要考虑两个星体跟踪器全部被太阳活动屏蔽、甚至同时发生其他故障的情形,并设法应对。
代码生成和测试台验证
团队在 Simulink 中通过闭环仿真对控制器设计进行初步验证。然后,他们使用 Simulink Coder™ 从控制器模型生成代码,再用生成的代码代替控制器模型进行软件在环 (SIL) 仿真。
经过 SIL 测试和代码优化后,团队在 JHU APL 的测试台上对控制设计进行验证(图 6)。在这一阶段,团队从 Simulink 姿态控制模型生成代码并移交至飞行软件组,后者将这些代码整合到帕克太阳探测器的飞行软件中。同时,设计团队从真实模型生成代码并提交至测试台小组,后者将这些代码集成到模拟帕克太阳探测器硬件的测试台。随后,他们在测试台上对飞行软件进行验收测试。随着发射临近,测试台上有越来越多的模拟部件被集成在探测器上的真实硬件部件所取代;例如,模拟反作用飞轮被换成了真实的反作用飞轮。

图 6. JHU APL 的测试台。JHU APL 供图。
在任务执行过程中进行调整
2018 年 8 月 12 日,星期日,帕克太阳探测器搭乘一枚德尔塔 4 号重型火箭,从佛罗里达州卡纳维拉尔角空军基地发射升空(图 7)。除了将科学数据中继送返地球之外,该探测器还会发送遥测数据,我们的团队对这些数据进行分析,并与 Simulink 中的仿真结果进行对比。APL 团队已基于对比结果对真实模型进行了完善和校准。

图 7. 帕克太阳探测器发射升空。JHU APL 供图。
帕克太阳探测器(包括姿态控制系统)设计为自主运行,部分原因在于来自地球的无线电信号经 15 分钟以上才能到达探测器。不过,团队仍可通过以下三种方式在任务执行过程中进行调整:发送命令以执行预先计划的操作或动作,修改飞行软件参数,以及更新飞行软件本身。自发射以来,团队已进行了两次软件更新,纳入了经过最新真实模型验证的各项改进。
随着任务推进,帕克太阳探测器的飞行轨道将不断降低,轨道周期也将缩短。APL 团队正在开发 MATLAB 自动化工具,用于快速分析来自探测器的新数据并尽快做出响应,以在下次飞掠之前完成必要改动。控制软件一直运行良好,甚至应该说是远超预期。
2020 年发布