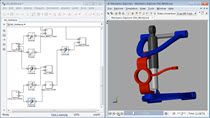
Inverted Pendulum Control with SimMechanics and QUARC
Design a controller for a rotary inverted pendulum using a SimMechanics™ model imported from CAD. Generate code using QUARC and test the controller on Quanser real-time hardware.
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.