Utiliser Simulink pour simuler un robot mobile et éviter les collisions
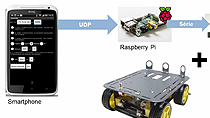
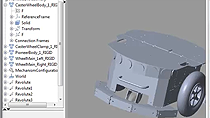
Dans ce webinar, nous aborderons les problématiques liées à la navigation dans l’espace d’un robot mobile incluant la modélisation dans un outil CAO de type SolidWorks, l’export de ce modèle dans Simulink, la conception des algorithmes de contrôle et la simulation du système en boucle fermée.
Enregistrée: 9 septembre 2014
Produit présenté