Motion Planning Hands-on Using RRT Algorithm
This video series introduces popular search and sampling-based motion planning algorithms such as Hybrid A*, RRT and RRT*. You will learn about a customizable framework for sampling-based planning algorithms such as RRT and RRT* with Navigation Toolbox™. Further, the series includes hands-on tutorials with reference examples in MATLAB for using the RRT algorithm in different applications such as mobile robots and manipulators.
Introduction to Motion Planning Algorithms
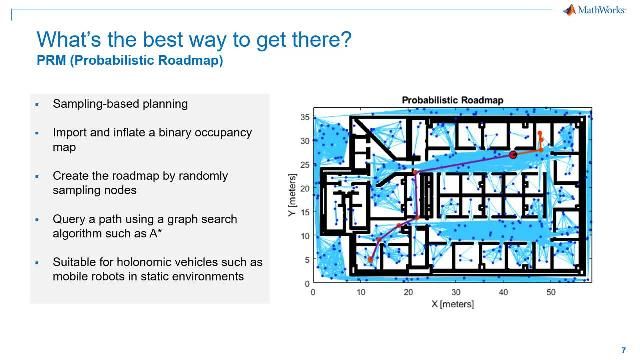
Motion planning lets robots or vehicles plan an obstacle-free path to a given destination. Learn some popular motion planning algorithms, how they work, and their applicability in different scenarios.

RRT Algorithm for Mobile Robots
Learn how to use the rapidly-exploring random tree (RRT) algorithm to plan paths for mobile robots through known maps. Watch how to tune the planners with custom state spaces and motion models.

Bi-Directional RRT Algorithm for Robot Manipulators
Learn about the bi-directional rapidly-exploring random tree (RRT) algorithm for robot manipulators, and how to tune some of the parameters to design robot motion planners.

Learn how to use a customizable path-planning template for the RRT path planner to find paths in 3D occupancy maps. Use a fixed-wing guidance model to simulate a UAV to follow the planned path.