Generate Trajectory Live Editor Task for Flight Mission
This example shows how to use the Generate Trajectory live task to create a flight mission trajectory.
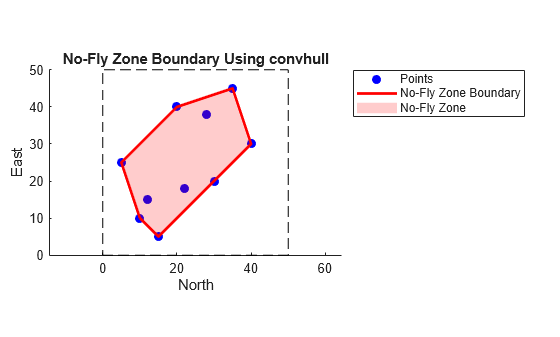
Define Boundary Area
xlim = [0 50]; ylim = [0 50];
Define a consistent set of points inside the area.
x = [10 20 35 40 30 15 5 12 28 22]; y = [10 40 45 30 20 5 25 15 38 18];
Use the convhull function to compute the convex hull indices.
hullIdx = convhull(x, y);
Plot the square area.
figure; hold on; rectangle('Position',[xlim(1), ylim(1), xlim(2)-xlim(1), ylim(2)-ylim(1)], ... 'EdgeColor','k','LineStyle','--');
Plot the points.
plot(x, y, 'bo', 'MarkerFaceColor', 'b');
Plot the convex hull boundary.
plot(x(hullIdx), y(hullIdx), 'r-', 'LineWidth', 2);
Fill the no-fly zone an configure the axis settings.
fill(x(hullIdx), y(hullIdx), 'r', 'FaceAlpha', 0.2, 'EdgeColor', 'none'); % Axis settings axis([xlim ylim]); axis equal; title('No-Fly Zone Boundary Using convhull'); xlabel('North'); ylabel('East'); legend('Points','No-Fly Zone Boundary','No-Fly Zone', 'Location', 'bestoutside'); hold off;
Define Path Using Generate Trajectory Live Task
On the Live Editor tab, select Insert > Task, and then select Generate Trajectory.
% Specify vehicle properties Vehicle1.InitialPosition = [0 0]; Vehicle1.Speed = 10; Vehicle1.InitialAltitude = 0; Vehicle1.InitialHeading = 0; % Generate signals for polyline trajectory % Segment parameters segDistances = [20, 10, 30, 20]; bearings = [0, pi/4, pi/4, pi/2]; bearingTypes = ["AbsoluteBearing", "AbsoluteBearing", "AbsoluteBearing", ... "AbsoluteBearing"]; altitudes = [0, 0, 0, 0]; % Initial trajectory Vehicle1Traj = Aero.trajectory.polylineTrajectory(CoordinatePlane="Flat", ... InitialPosition=Vehicle1.InitialPosition, ... Speed=Vehicle1.Speed, ... InitialHeading=Vehicle1.InitialHeading, ... InitialAltitude=Vehicle1.InitialAltitude, ... OutputFormat="timeseries", ... Units="Metric (MKS)", ... StartTime="2025-12-15 10:10:12", ... SegmentDistance=segDistances(1), ... AbsoluteBearing=bearings(1), ... Altitude=altitudes(1)); % Add waypoints for i = 2:numel(segDistances) params = struct(... 'PriorTrajectory', Vehicle1Traj, ... 'Speed', Vehicle1.Speed, ... 'SegmentDistance', segDistances(i), ... 'Altitude', altitudes(i)); params.(bearingTypes(i)) = bearings(i); Vehicle1Traj = Aero.trajectory.polylineTrajectory(params); end clear Vehicle1 bearings bearingTypes segDistances altitudes i params
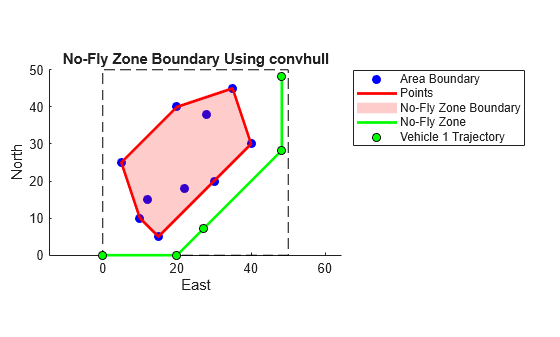
Plot Path in Map
Extract trajectory data from timeseries.
xTraj = Vehicle1Traj.xNorth.Data; yTraj = Vehicle1Traj.yEast.Data;
Plot the square area.
figure;
Assume the axes should go from xmin to xmax and ymin to ymax.
xmin = 0; xmax = 50; ymin = 0; ymax = 50; hold on; rectangle('Position',[xlim(1), ylim(1), xlim(2)-xlim(1), ylim(2)-ylim(1)], ... 'EdgeColor','k','LineStyle','--');
Plot the points.
plot(x, y, 'bo', 'MarkerFaceColor', 'b');
Plot the convex hull boundary.
plot(x(hullIdx), y(hullIdx), 'r-', 'LineWidth', 2);
Fill the no-fly zone.
fill(x(hullIdx), y(hullIdx), 'r', 'FaceAlpha', 0.2, 'EdgeColor', 'none');
Configure axis settings.
axis([xlim ylim]); axis equal; title('No-Fly Zone Boundary Using convhull'); xlabel('East'); ylabel('North'); % legend('Area Boundary','Points','No-Fly Zone Boundary','No-Fly Zone'); % Plot the trajectory on the existing figure hold on; % Keep the previous plot plot(xTraj, yTraj, 'g-', 'LineWidth', 2); % Plot trajectory as green line plot(xTraj, yTraj, 'ko', 'MarkerFaceColor', 'g'); % Plot trajectory points as green dots
Add definitions to the legend.
legend('-DynamicLegend'); legend('Area Boundary','Points','No-Fly Zone Boundary','No-Fly Zone','Vehicle 1 Trajectory', 'Location', 'bestoutside'); hold off;
clearvars -except Vehicle1Traj