Generate Trajectory
Description
The Generate Trajectory task enables you to interactively create standard trajectories using three different unit systems, generate corresponding reference signals, and add events to the generated trajectory.
You can specify the trajectory start time and choose to output the data in either
timeseries or timetable format.
The task automatically generates MATLAB® code, allowing for further modification and integration into your workflow.
For general information about Live Editor tasks, see Add Interactive Tasks to a Live Script.
By default, the live task creates a workspace variable,
Vehicle1Trajectory.
Related Functions
Generate Trajectory generates code that uses these functions:
Open the Task
To add the Generate Trajectory task to a live script in the MATLAB Editor:
On the Live Editor tab, select Task > Generate Trajectory.
In a code block in the script, type a relevant keyword, such as
generateortrajectory. From the selected completions, select Generate Trajectory.

Examples
This example shows how to use the Generate
Trajectory Live Editor task to create reference signals for a bezier
trajectory. By default, Generate Trajectory creates a
variable named Vehicle1Traj in the workspace that outputs data in the
timeseries format.
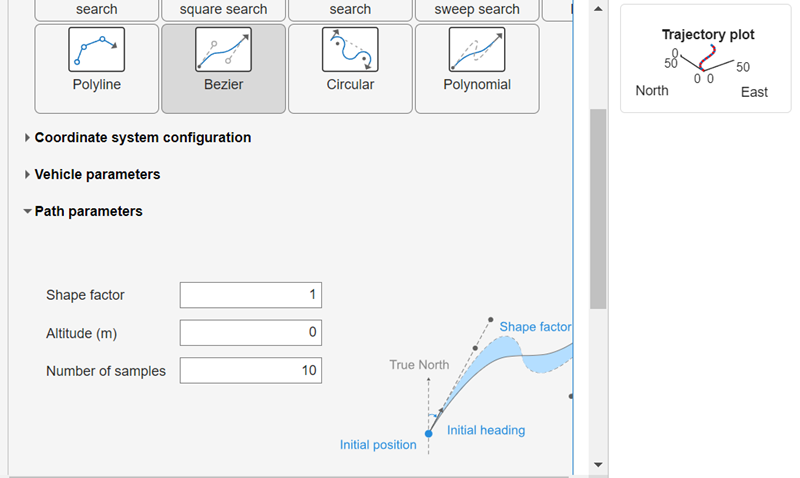
From Select trajectory type, select
Bezier.
In Vehicle parameters section, set Initial
position to [10 0].
In Path parameters section, set the Shape
factor to 1.
The live task prepopulates with default values.
In the Display results section, click 3D Plot.
To the upper right, a plot of the waveform displays.
To see the code that this task generates, expand the task display by clicking ![]() at the bottom of the task parameter area.
at the bottom of the task parameter area.
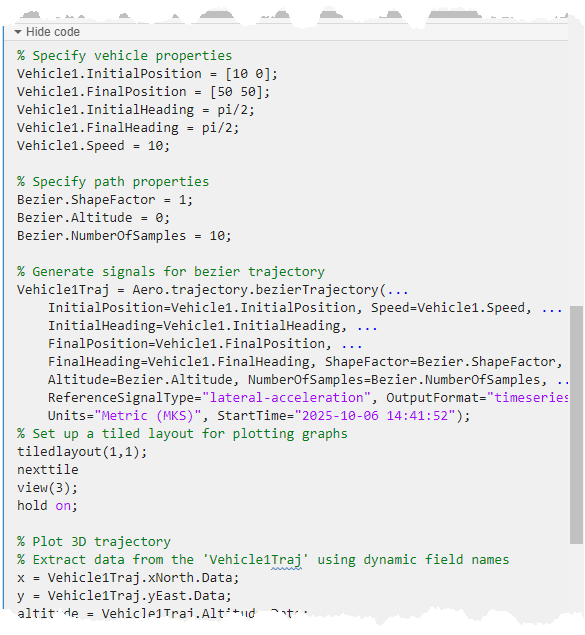
You can use the data from the Vehicle1Trajectory
timeseries object in many cases where you want to input data, for
example, to import to Signal Editor for modeling trajectories. To save this task, save
the live script.
This example shows how to use the Generate
Trajectory Live Editor task to create reference signals for a bezier
trajectory. By default, Generate Trajectory creates a
variable named Vehicle1Traj in the workspace that outputs data in the
timeseries format.
From the Select trajectory type, select
Bezier.
In the Vehicle parameters section, set Initial
position to [10 0].
In the Path parameters section, set the Shape
factor to 2.
Leave the other parameters at their default values.
From the MATLAB Command Window, create a model and add a Signal Editor block.
In the Signal Editor block, click the Open Signal Editor button. The Signal Editor tool opens.
In the Signal Editor tool, on the Signal Editor tab, click Import.
In the Import dialog box, under Select signals to import,
select Vehicle1Traj, and then click OK.
In the Signal Editor, drag the Vehicle1Traj bus to
the active Scenario.

Save the updates to a new MAT file, such as C:\work\veh1traj.mat.
Close the Signal Editor tool.
In the Signal Editor block, set File name to the name of the new MAT file.
Use the output signals from the Signal Editor block in your aerospace application.
Related Examples
Parameters
Version History
Introduced in R2026a
See Also
Functions
Aero.trajectory.addEvent|Aero.trajectory.bezierTrajectory|Aero.trajectory.tracklineTrajectory|Aero.trajectory.circularTrajectory|Aero.trajectory.creepingTrajectory|Aero.trajectory.expandingSquareTrajectory|Aero.trajectory.parallelSweepTrajectory|Aero.trajectory.polylineTrajectory|Aero.trajectory.polynomialTrajectory|Aero.trajectory.sectorTrajectory