Induction Motor
Three-phase induction motor
Libraries:
Powertrain Blockset /
Propulsion /
Electric Motors and Inverters
Motor Control Blockset /
Electrical Systems /
Motors
Description
The Induction Motor block implements a three-phase induction motor. The block uses the three-phase input voltages to regulate the individual phase currents, allowing control of the motor torque or speed.
Note
The block parameters use per-phase values of a star-equivalent induction motor.
By default, the block sets the Simulation
Type parameter to Continuous to use a continuous
sample time during simulation. If you want to generate code for fixed-step double- and
single-precision targets, considering setting the parameter to
Discrete. Then specify a Sample Time, Ts
parameter.
Three-Phase Sinusoidal Model Electrical System
The block implements equations that are expressed in a stationary rotor reference (dq) frame. The d-axis aligns with the a-axis. All quantities in the rotor reference frame are referred to the stator.
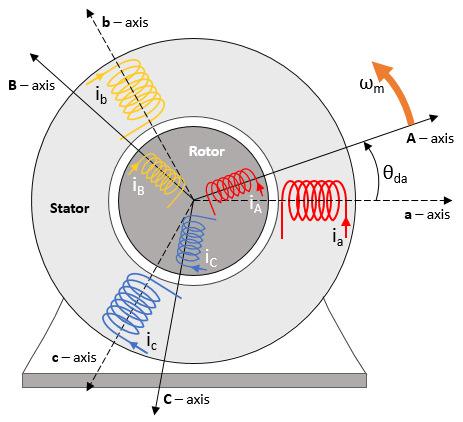
The block uses these equations to calculate the electrical speed (ωem) and slip speed (ωslip).
To calculate the dq rotor electrical speed with respect to the rotor A-axis (dA), the block uses the difference between the stator a-axis (da) speed and slip speed:
To simplify the equations for the flux, voltage, and current transformations, the block uses the rotor A-axis reference frame:
| Calculation | Equation |
|---|---|
| Flux |
|
| Current |
|
| Inductance |
|
| Electromagnetic torque |
|
Power invariant dq transformation to ensure that the dq and three phase powers are equal |
|
The equations use these variables.
ωm | Angular velocity of the rotor (rad/s) |
ωem | Electrical rotor speed (rad/s) |
ωslip | Electrical rotor slip speed (rad/s) |
ωsyn | Synchronous rotor speed (rad/s) |
ωda | dq stator electrical speed with respect to the stator a-axis (rad/s) |
ωdA | dq stator electrical speed with respect to the rotor A-axis (rad/s) |
Θda | dq stator electrical angle with respect to the stator a-axis (rad) |
ΘdA | dq stator electrical angle with respect to the rotor A-axis (rad) |
Lq, Ld | q- and d-axis inductances (H) |
Ls | Stator inductance (H) |
Lr | Rotor inductance (H) |
Lm | Magnetizing inductance (H) |
Lls | Stator leakage inductance (H) |
Llr | Rotor leakage inductance (H) |
vsq, vsd | Stator q- and d-axis voltages (V) |
isq, isd | Stator q- and d-axis currents (A) |
λsq, λsd | Stator q- and d-axis flux (Wb) |
irq, ird | Rotor q- and d-axis currents (A) |
λrq, λrd | Rotor q- and d-axis flux (Wb) |
| va, vb, vc | Stator voltage phases a, b, c (V) |
| ia, ib, ic | Stator currents phases a, b, c (A) |
Rs | Resistance of the stator windings (Ohm) |
Rr | Resistance of the rotor windings (Ohm) |
P | Number of pole pairs |
Te | Electromagnetic torque (Nm) |
Mechanical System
The motor angular velocity is given by:
The equations use these variables.
J | Combined inertia of motor and load (kgm^2) |
F | Combined viscous friction of motor and load (N·m/(rad/s)) |
θm | Motor mechanical angular position (rad) |
Tm | Motor shaft torque (Nm) |
Te | Electromagnetic torque (Nm) |
Tf | Motor shaft static friction torque (Nm) |
ωm | Angular mechanical velocity of the motor (rad/s) |
Power Accounting
For the power accounting, the block implements these equations.
| Bus Signal | Description | Variable | Equations | ||
|---|---|---|---|---|---|
|
|
| Mechanical power | Pmot | |
PwrBus | Electrical power | Pbus | |||
|
| PwrElecLoss | Resistive power loss | Pelec | ||
PwrMechLoss | Mechanical power loss | Pmech | When Port Configuration is set to
When Port
Configuration is set to
| ||
|
| PwrMtrStored | Stored motor power | Pstr | ||
The equations use these variables.
Rs | Stator resistance (Ohm) |
Rr | Rotor resistance (Ohm) |
ia, ib, ic | Stator phase a, b, and c current (A) |
isq, isd | Stator q- and d-axis currents (A) |
van, vbn, vcn | Stator phase a, b, and c voltage (V) |
ωm | Angular mechanical velocity of the rotor (rad/s) |
F | Combined viscous damping of motor and load (N·m/(rad/s)) |
Te | Electromagnetic torque (Nm) |
Tf | Combined friction torque of motor and load (Nm) |
Ports
Input
Output
Parameters
References
[1] Mohan, Ned. Advanced Electric Drives: Analysis, Control and Modeling Using Simulink. Minneapolis, MN: MNPERE, 2001.
Extended Capabilities
Version History
Introduced in R2017a
See Also
IM Controller | Flux-Based PMSM | Interior PMSM | Mapped Motor | Surface Mount PMSM
Topics
- Estimate Motor Parameters Using Motor Control Blockset Parameter Estimation Tool (Motor Control Blockset)