Develop, Resize, and Calibrate Motors with Dynamometer Test Harness
The motor dynamometer reference application represents a motor plant and controller connected to an AC dynamometer. Using the reference application, you can design and test traction e-motors and controllers for your electrified powertrain vehicle. To create and open a working copy of the motor dynamometer reference application project, use this command.
By default, the reference application is configured with an 80 kW Flux-Based PMSM motor.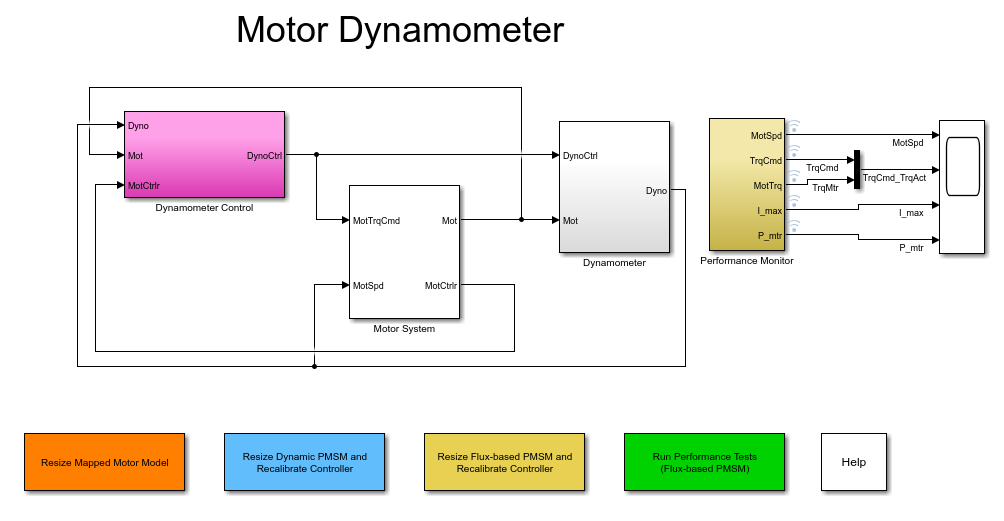
You can configure the reference application project for different dynamometer control modes. To implement the operating modes, the reference application uses variant subsystems.
This table summarizes the dynamometer tests.
| Test | Objective | Method | Motor Type | ||
|---|---|---|---|---|---|
| Mapped | Dynamic PMSM | Flux-Based PMSM | |||
Resize Mapped Motor Model | Match motor torque to desired maximum power, torque, DC link voltage, and constant power speed ratio (CPSR). | Dynamometer resizes the mapped motor and motor calibration parameters. For more details, see Resize Electric Motors. | ✓ | ||
Resize Dynamic PMSM and Recalibrate Controller | Match motor torque to desired maximum power level and DC link voltage. | Dynamometer resizes the dynamic PMSM motor and motor calibration parameters. The dynamometer also recalibrates the controller. For more details, see Resize Electric Motors. | ✓ | ||
Resize Flux-based PMSM and Recalibrate Controller | Match motor torque to desired maximum power level and DC link voltage. | Dynamometer resizes the flux-based PMSM motor and motor calibration parameters. The dynamometer also recalibrates the controller. For more details, see Resize Electric Motors. | ✓ | ||
Run Performance Tests | Run dynamic and steady-state performance tests at different operating points of torque and speed. | Dynamometer controller commands a series of motor speeds and torques to the motor controller. At each quasi-steady-state operating point, the experiment records the motor plant model output and the controller commands for the current calibration parameters. | ✓ | ✓ | ✓ |
Note
Some controllers implement Stateflow® logic. The dynamometer runs without Stateflow by default, but any logic modification requires Stateflow.
Motor System
The reference application includes variant subsystems for Mapped (steady-state), Dynamic PMSM, and Flux-Based PMSM motors.
| Objective | Motor Variant |
|---|---|
Simulate and validate motor system response based on high-level specifications. | Mapped |
Simulate and validate linear dynamic models based on existing motor details. | Dynamic PMSM |
Simulate and validate nonlinear dynamic models based on existing motor details. | Flux-Based PMSM |
Performance Monitor
The reference application contains a Performance Monitor block that you can use to plot steady-state and dynamic results. You can plot:
Steady-state results as a function of one or two variables.
Dynamic results using the Simulation Data Inspector.
See Also
Mapped Motor | Interior PM Controller | Interior PMSM | Flux-Based PM Controller | Flux-Based PMSM