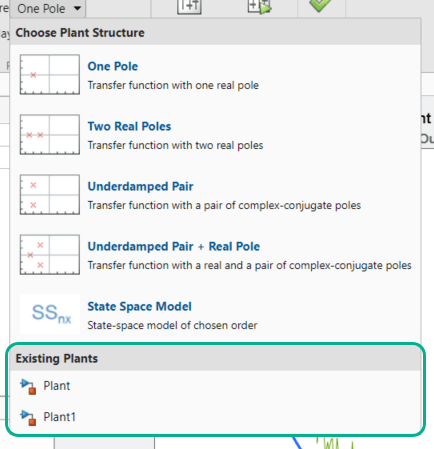
选择辨识的被控对象结构
PID 调节器提供两种表示被控对象动态特性的模型结构:过程模型和状态空间模型。
请根据您对系统特性的了解和您的应用所需的精确度来选择模型结构。在没有任何先验信息的情况下,您可以通过分析试验获得的系统阶跃响应和频率响应来了解动态特性和延迟的阶数。有关详细信息,请参阅 System Identification Toolbox™ 文档中的以下内容:
您选择的每个模型结构都有关联的动态元素,即模型参数。您可以手动或自动调整这些参数的值,以找到合适的辨识模型,确保模型产生的结果与测得或仿真的响应数据高度匹配。在许多情况下,如果不能确定使用哪个结构最好,不妨从最简单的模型结构开始,即具有一个极点的传递函数。您可以逐步尝试用高阶结构进行辨识,直到被控对象响应与测得的输出高度匹配。状态空间模型结构允许基于输入-输出数据分析来自动搜索最佳模型阶数。
当您开始被控对象辨识任务时,默认情况下会选择具有一个实极点的传递函数模型结构体。这种默认设置对数据性质不敏感,可能不太适合您的应用。因此,建议您先选择合适的模型结构,再执行参数辨识。
过程模型
过程模型是具有 3 个或更少极点的传递函数,并且可以通过添加零点、延迟和积分器元素来得到增强。过程模型由表示时间常数、增益和时滞的模型参数来参数化。在 PID 调节器中,使用结构菜单在被控对象辨识选项卡中选择一个过程模型。

对于所选的任何结构,您都可以使用对应的复选框添加延迟、零点和/或积分器元素。点击编辑参数以查看通过这些选择项配置的模型传递函数。
可选的最简单的过程模型是具有一个实极点且没有零点或延迟元素的传递函数:
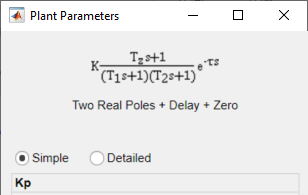
此模型由参数 K(即增益)和第一个时间常数 T1 定义。可选的最复杂的过程模型结构具有三个极点、一个附加积分器、一个零点和一个时滞,例如以下模型,它具有一个实极点和一对复共轭极点:
在此模型中,可配置参数包括与零极点相关联的时间常数 T1、Tω 和 Tz。其他参数是阻尼系数 ζ、增益 K 和时滞 τ。
当您选择过程模型类型时,PID 调节器会自动计算被控对象参数的初始值并显示一个图,图中显示估计的模型响应和您测得或仿真的数据。您可以使用图上的指示符以图形方式编辑参数值,或使用被控对象参数编辑器以数值方式编辑参数值。有关说明此过程的示例,请参阅根据响应数据以交互方式估计被控对象参数。
下表总结了定义可用的过程模型类型的各种参数。
| 参数 | 使用方 | 描述 |
|---|---|---|
| K - 增益 | 所有传递函数 | 可以取任何实数值。 在图中,向上或向下拖动被控对象响应曲线(蓝色)以调整 K。 |
| T1 - 第一个时间常数 | 具有一个或多个实极点的传递函数 | 可以取 0 到 T(即测得或仿真数据的时间跨度)之间的任意值。 在图中,向左(朝向零)或向右(朝向 T)拖动红色 x 以调整 T1。 |
| T2 - 第二个时间常数 | 具有两个实极点的传递函数 | 可以取 0 到 T(即测得或仿真数据的时间跨度)之间的任意值。 在图中,向左(朝向零)或向右(朝向 T)拖动品红 x 以调整 T2。 |
| Tω - 与固有频率 ωn 相关联的时间常数,其中 Tω = 1/ωn | 具有欠阻尼极点对组(复共轭对组)的传递函数 | 可以取 0 到 T(即测得或仿真数据的时间跨度)之间的任意值。 在图中,向左(朝向零)或向右(朝向 T)拖动其中一条橙色响应包络曲线以调整 Tω。 |
| ζ - 阻尼系数 | 具有欠阻尼极点对组(复共轭对组)的传递函数 | 可以取 0 到 1 之间的任何值。 在图中,向左(朝向零)或向右(朝向 T)拖动其中一条橙色响应包络曲线以调整 ζ。 |
| τ - 传输延迟 | 任何传递函数 | 可以取 0 到 T(即测得或仿真数据的时间跨度)之间的任意值。 在图中,向左(朝向零)或向右(朝向 T)拖动橙色竖线来调整 τ。 |
| Tz - 模型零点 | 任何传递函数 | 可以取 –T 到 T(即测得或仿真数据的时间跨度)之间的任意值。 在图中,向左(朝向 T)或向右(朝向 T)拖动红色圆圈以调整 Tz。 |
| 积分器 | 任何传递函数 | 将系数 1/s 添加到传递函数。没有要调整的关联参数。 |
状态空间模型
用于辨识的状态空间模型结构主要由所选的状态数量定义,即模型阶数。如果需要比过程模型结构支持的阶数更高的模型来高度匹配测得或仿真的 I/O 数据,请使用状态空间模型结构。在状态空间模型结构中,系统动态特性由状态和输出方程表示:
x 是状态变量的向量,由软件根据所选模型阶数自动选择。u 表示输入信号,y 表示输出信号。
要使用状态空间模型结构,请在被控对象辨识选项卡的结构菜单中,选择状态空间模型。然后点击配置结构以打开状态空间模型结构对话框。
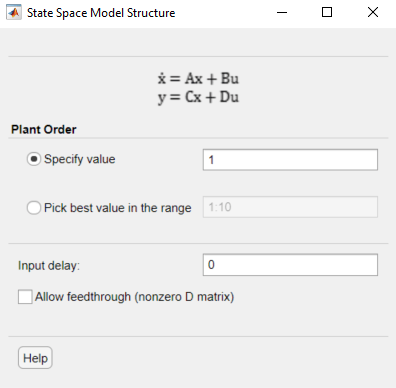
使用该对话框指定模型阶数、延迟和馈通特性。如果您不确定阶数,请选择选择范围内的最佳值,并输入阶数范围。在这种情况下,当您在被控对象估计选项卡中点击估计时,软件会显示汉克尔奇异值的条形图。选择与对系统动态特性起重要作用的汉克尔奇异值的数量相等的模型阶数。
选择状态空间模型结构时,仅当存在有效的估计模型时,辨识图才显示被控对象响应(蓝色)曲线。例如,如果您在估计过程模型后更改结构,则会显示估计的模型的等效状态空间。如果您更改模型阶数,则被控对象响应曲线会消失,直到执行新估计。
在使用状态空间模型结构时,您无法直接与模型参数交互。因此,辨识的模型应认为是非结构化的,且模型的状态变量没有物理意义。
但是,您可以通过图形方式调整模型的输入延迟和整体增益。当您选择具有时滞的状态空间模型时,延迟在图上用橙色竖线表示。水平拖动此竖线可更改延迟值。上下拖动被控对象响应(蓝色)曲线可调整模型增益。
现有被控对象模型
任何先前导入或辨识的被控对象模型都列在被控对象列表区域中。
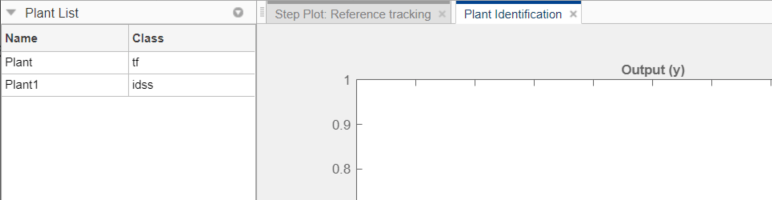
您可以使用这些被控对象其中之一定义模型结构并初始化模型参数值。为此,在被控对象辨识选项卡的结构菜单中,选择一个线性被控对象模型。
如果您选择的被控对象是一个过程模型(idproc (System Identification Toolbox) 对象),PID 调节器会对辨识的被控对象使用其结构。如果被控对象是其他模型类型,PID 调节器会使用状态空间模型结构。该 App 使用所选被控对象初始化估计的被控对象参数。
在模型结构之间切换
从一种模型结构切换到另一种结构时,软件会尽可能保留模型特性(零极点位置、增益、延迟)。例如,当您从单极点模型切换到双极点模型时,T1、Tz、τ 和 K 的现有值将保留,T2 将初始化为默认值(或先前分配的值,如果有)。
估计参数值
一旦选择了模型结构,就可以使用几个选项手动或自动调整参数值,以使估计的模型响应与测得或仿真的输入/输出数据高度匹配。有关说明所有这些选项的示例,请参阅:
根据响应数据以交互方式估计被控对象参数 (Control System Toolbox™)
Interactively Estimate Plant from Measured or Simulated Response Data (Simulink Control Design) Simulink® Control Design™)
PID 调节器不会在选择模型结构后执行模型参数的智能初始化。相反,图中反映的模型参数的初始值是在范围值的中间任意选择的。如果您在手动调整参数值之前需要一个良好的起点,请使用被控对象辨识选项卡中的初始化和估计选项。
处理初始条件
在某些情况下,初始条件对系统响应有重大影响。因此,仅用传递函数形式描述输入到输出的关系不足以拟合观测到的数据。对于包含弱阻尼模式的系统尤其如此。除了模型参数之外,您还可以使用 PID 调节器估计初始条件,确保初始条件响应和输入响应之和与观测到的输出高度匹配。使用估计选项对话框指定在自动估计过程中如何处理初始条件。默认情况下,初始条件处理(是固定为零值还是固定为估计值)由估计算法自动执行。但是,您可以通过使用“初始条件”菜单来强制执行某特定选择项。
初始条件只能使用自动估计来估计。与模型参数不同,初始条件无法手动修改。然而,一旦进行了估计,它们将保持固定为其估计值,除非更改模型结构或者导入新辨识数据。
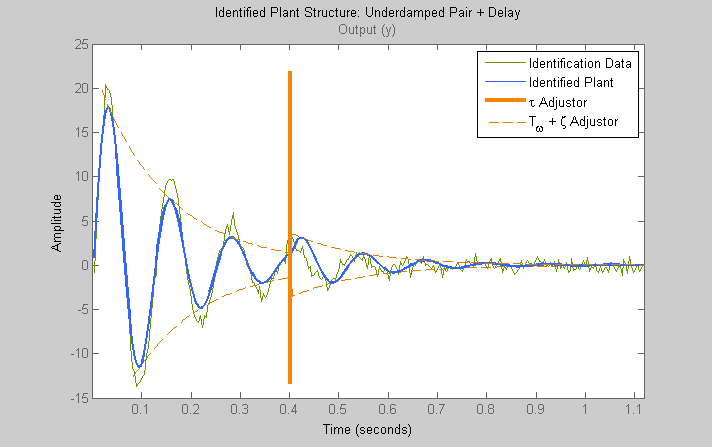
如果在执行自动估计后修改模型参数,模型响应将显示固定的初始条件的影响(即独立于模型参数的影响)。在下图中,初始条件的影响被辨识为特别显著。当之后调整延迟时,输入延迟标记左侧的响应部分(τ 调整器)受的影响完全来自初始条件。τ 调整器右侧的部分同时受输入信号和初始条件的影响。