PID 控制器调节
PID 增益的自动和交互式调节
Control System Toolbox™ 软件提供了多个用于调节 PID 控制器的工具和命令。要选择最适合您的应用的工具,请参阅选择 PID 控制器设计工具。
有关在 Simulink® 模型中调节 PID 控制器的信息,请参阅基于模型的 PID 控制器调节 (Simulink Control Design)。
App
| PID 调节器 | 调节 PID 控制器 |
实时编辑器任务
| 调节 PID 控制器 | Tune PID Controller for LTI plant in the Live Editor |
函数
pidtune | 线性被控对象模型的 PID 调节算法 |
pidtuneOptions | 为 pidtune 函数定义选项 |
getPIDLoopResponse | Closed-loop and open-loop responses of systems with PID controllers |
pidTuner | 打开 PID 调节器进行 PID 调节 |
主题
PID 调节基础知识
- 选择 PID 控制器设计工具
Control System Toolbox 软件提供了几种用于设计 PID 控制器的工具。 - 用 PID 调节器设计 PID 控制器
PID 调节器可用于执行 PID 控制器的自动、交互式调节。 - PID Controller Types for Tuning
Control System Toolbox PID tuning tools can generate and tune many PID and 2-DOF PID controller types.
交互式 PID 调节
- 用于快速参考跟踪的 PID 控制器设计
调节 PID 控制器以满足上升时间和稳定时间要求。 - 调节 PID 控制器以侧重参考跟踪或抗扰(PID 调节器)
PID 调节是参考跟踪和抗扰这两个性能度量之间的权衡。此示例说明在使用 PID 调节器时如何进行调节以侧重两者之一。 - PID Controller Design in the Live Editor
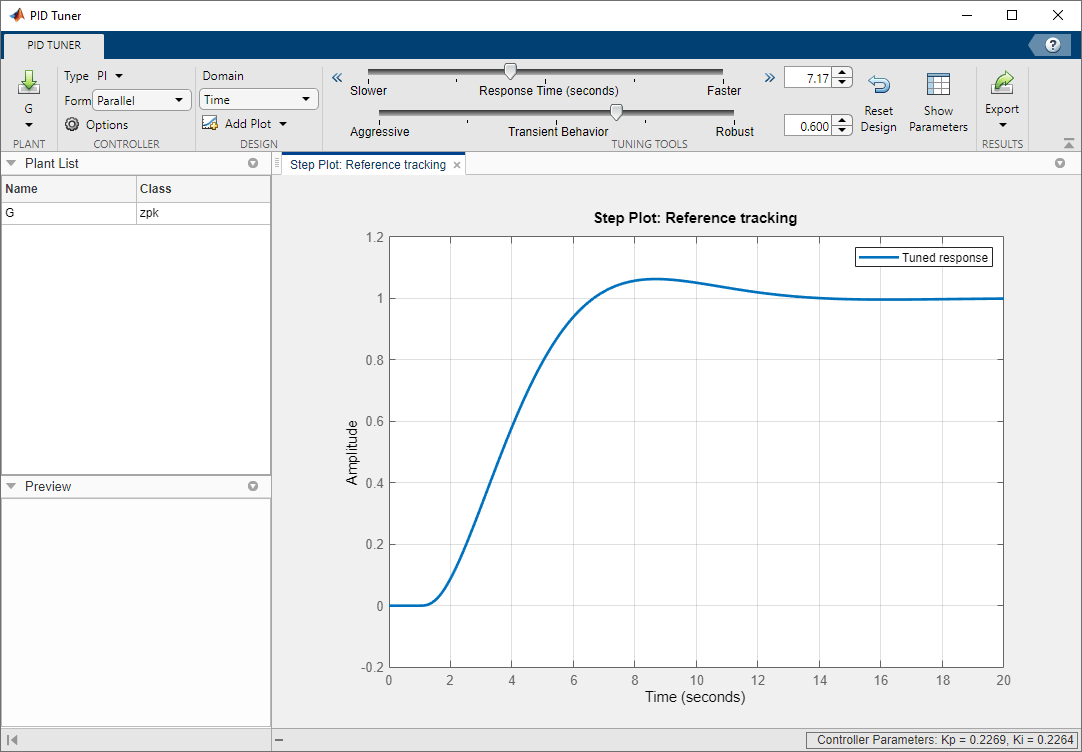
Use the Tune PID Controller task to generate code in the Live Editor for designing a PID controller for a linear plant model. - 在 PID 调节器中分析设计
PID 调节器为调节 PID 控制器提供系统响应图和其他工具。
命令行 PID 调节
- 使用命令行设计 PID 控制器
使用pidtune命令以编程方式调节 PID 控制器。 - 调节 PID 控制器以侧重参考跟踪或抗扰(命令行)
在命令行中使用pidtune命令的调节选项来侧重参考跟踪或抗扰。 - 设计具有 PI 控制器的级联控制系统
使用pidtune命令为级联控制系统设计两个 PI 控制器。
基于测量响应数据的 PID 控制器设计
- 根据响应数据以交互方式估计被控对象参数
如果您有 System Identification Toolbox™ 软件,您可以使用 PID 调节器根据从系统测得的响应数据来估计线性被控对象模型。然后,PID 调节器会为生成的模型调节 PID 控制器。 - Tune PID Controller from Measured Plant Data in Live Editor
Use Live Editor Tasks to generate code for tuning a PID controller based on measured plant response. - PID 控制的系统辨识
系统辨识是根据系统对已知激励的响应,估计您要控制的系统的动态表示的过程。
二自由度 PID 控制器
- Tune 2-DOF PID Controller (PID Tuner)
Design a two-degree-of-freedom (2-DOF) PID controller, and compare the controller performance with that of a 1-DOF PID controller. - Tune 2-DOF PID Controller (Command Line)
Design a two-degree-of-freedom (2-DOF) PID controller, and compare the controller performance with that of a 1-DOF PID controller.
在 Simulink 中调节
- Simulink 中的 PID 控制器调节
您可以使用 PID 调节器调节 PID Controller 模块的增益,以实现具有所需响应时间的稳健设计。 - Design PID Controller Using Simulated I/O Data
This example shows how to tune a PID controller for plants that cannot be linearized. - Design PID Controller Using Estimated Frequency Response
When your plant cannot be linearized, you can estimate a plant model using frequency response estimation and import the plant model into PID Tuner.
PID 算法
- PID 调节算法
MathWorks® 用于调节 PID 控制器的算法可调节 PID 增益,以实现性能和稳健性之间的良好平衡。
精选示例
使用 PID 调节器设计具备抗扰性能的 PID 控制器
此示例说明如何使用 PID 调节器设计具备良好抗扰性能的 PI 控制器。此示例还说明如何设计兼具良好抗扰性能和参考跟踪性能的 ISA-PID 控制器。
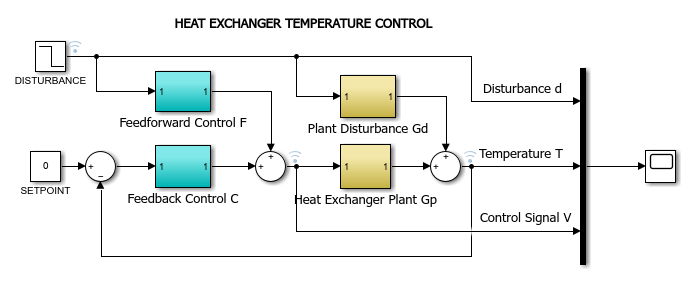
换热器的温度控制
此示例说明如何设计反馈和前馈补偿器,以通过换热器调节化学反应器的温度。
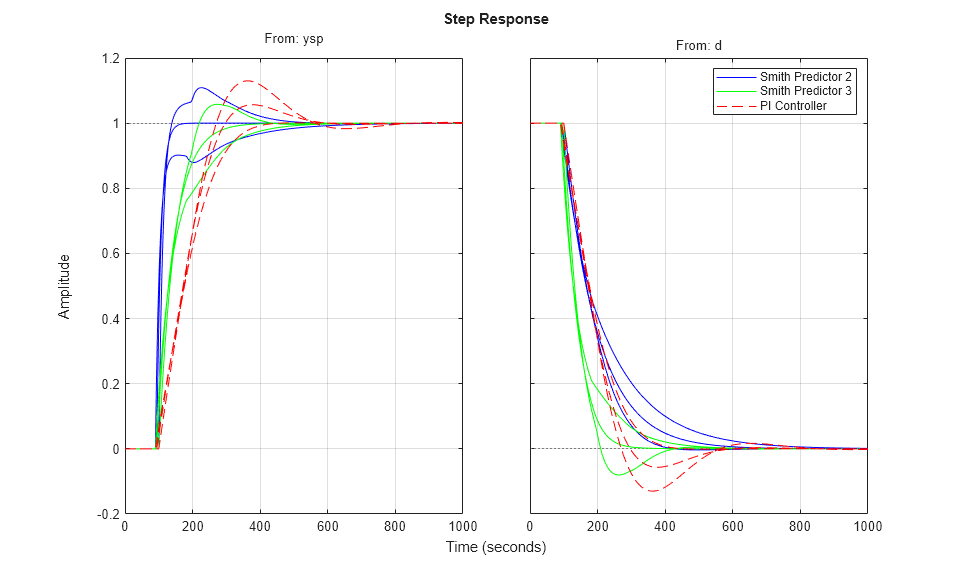
Control of Processes with Long Dead Time: The Smith Predictor
The limitations of PI control for processes with long dead time and illustrates the benefits of a control strategy called "Smith Predictor."