getPIDLoopResponse
Closed-loop and open-loop responses of systems with PID controllers
Description
response = getPIDLoopResponse(C,G,looptype)C
and the plant G. The function returns the closed-loop, open-loop,
controller action, or disturbance response that you specify with the
looptype argument. The function assumes the following control
architecture.
When
Cis apidorpidstdcontroller object (1-DOF controller):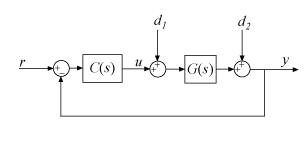
When
Cis apid2orpidstd2controller object (2-DOF controller):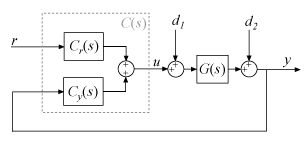
Examples
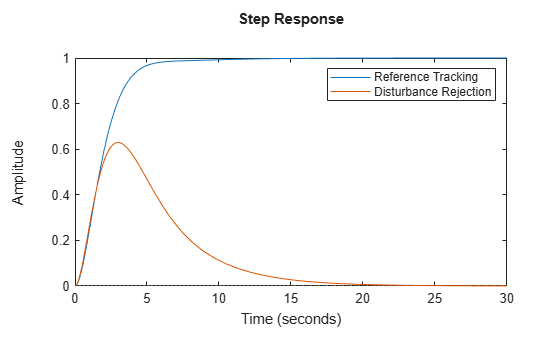
Design a PI controller for a SISO plant and examine its performance in reference tracking and disturbance rejection. For reference tracking, use the "closed-loop" response. For rejection of a load disturbance, use "input-disturbance".
G = tf(1,[1 1 1]); C = pidtune(G,'PI'); Tref = getPIDLoopResponse(C,G,"closed-loop"); Tdist = getPIDLoopResponse(C,G,"input-disturbance"); step(Tref,Tdist) legend("Reference Tracking","Disturbance Rejection")
Validate the tuned controller by comparing the extracted responses to your design requirements for settling time and overshoot.
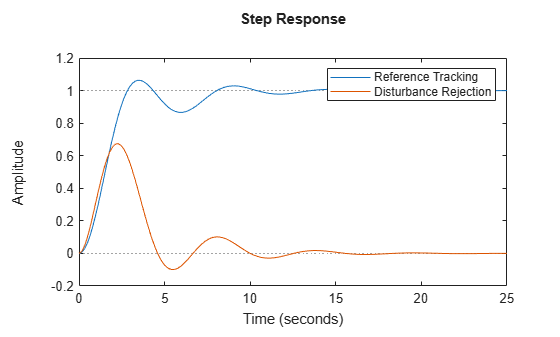
Design a two-degree-of-freedom (2-DOF) PID controller for a plant and examine its performance in reference tracking and disturbance rejection. For reference tracking, use the "closed-loop" response. For rejection of a load disturbance, use "input-disturbance".
G = tf(1,[1 0.5 0.1]); w0 = 1.5; C = pidtune(G,'PID2',w0); Tref = getPIDLoopResponse(C,G,"closed-loop"); Tdist = getPIDLoopResponse(C,G,"input-disturbance"); step(Tref,Tdist) legend("Reference Tracking","Disturbance Rejection")
Input Arguments
Output Arguments
Version History
Introduced in R2019a