基于模型的 PID 控制器调节
Simulink Control Design™ PID 调节工具可用于调节包含连续或离散 PID Controller 或 PID Controller (2DOF) Simulink 模块的单环控制系统。要决定哪个 PID 调节工具适合您的应用,请参阅Choose a Control Design Approach。
图形化工具
| PID 调节器 | 调节 PID 控制器 |
模块
| PID Controller | 连续时间或离散时间 PID 控制器 |
| PID Controller (2DOF) | 连续时间或离散时间二自由度 PID 控制器 |
| Discrete PID Controller | 离散时间或连续时间 PID 控制器 |
| Discrete PID Controller (2DOF) | 离散时间或连续时间二自由度 PID 控制器 |
主题
PID 调节基础知识
- Choose a Control Design Approach
Simulink Control Design provides several approaches to tuning Simulink blocks, such as Transfer Fcn and PID Controller blocks. - Simulink 中基于模型的 PID 调节简介
在包含 PID Controller 或 PID Controller (2DOF) 模块的 Simulink 模型中,使用 PID 调节器对 PID 增益进行交互式调节。
- Tune PID Controller to Favor Reference Tracking or Disturbance Rejection
Tune a PID controller to reduce overshoot in reference tracking or to improve rejection of a disturbance at the plant input. - Tune PID Controller Within Model Reference
When you open PID Tuner from a controller block in a model that is referenced in one or more open models, specify the top-level model for linearization and tuning.
备选被控对象模型
- 在不同工作点上调节
默认情况下,PID 调节器会线性化您的被控对象,并在 Simulink 模型中的初始条件指定的工作点上设计一个控制器。有时,此工作点不同于您要为其设计控制器的工作点。 - Design PID Controller from Plant Frequency-Response Data
When your plant model does not linearize, one option is to design a PID controller based on simulated frequency-response data. Simulink Control Design gives you several ways to do so.
- Interactively Estimate Plant from Measured or Simulated Response Data
For plants that do not linearize, if you have System Identification Toolbox™ software, PID Tuner lets you estimate the parameters of a linear plant model based on time-domain response data. You can then tune a PID controller for the resulting estimated model.
增益调度 PID 控制
- Design Family of PID Controllers for Multiple Operating Points
If your nonlinear Simulink model operates over a wide range of operating conditions, you can design an array of PID controllers for multiple model operating points. - Implement Gain-Scheduled PID Controllers
To implement gain-scheduled control using a family of PID controllers, create a lookup table that associates each plant operating point with the corresponding PID gains.
二自由度 PID 控制器
- Design Two-Degree-of-Freedom PID Controllers
Tune PID Controller (2DOF) blocks to achieve both good setpoint tracking and good disturbance rejection. - Specify PI-D and I-PD Controllers
PI-D and I-PD controllers are used to mitigate the influence of changes in the reference signal on the control signal. These controllers are variants of the 2DOF PID controller.
疑难解答
Plant Cannot Be Linearized or Linearizes to Zero
Some Simulink blocks, such as those with sharp discontinuities, can produce poor linearization results. For example, when your model operates in a region away from the point of discontinuity, the linearization of the block is zero.
Cannot Find a Good Design in PID Tuner
If you cannot find a good design using PID Tuner, try a different PID controller type. If no PID controller is satisfactory, consider designing a more complex controller.
Simulated Response Does Not Match PID Tuner Response
When you run your Simulink model using the PID gains computed by PID Tuner, the simulation output can differ from the PID Tuner response plot.
Cannot Find Acceptable PID Design in Simulated Model
When you run your Simulink model using the PID gains computed by PID Tuner, the simulation output may not meet your design requirements.
Controller Performance Deteriorates When Switching Time Domains
If controller performance deteriorates when you discretize a tuned continuous-time PID controller, consider tuning a discrete-time controller directly.
When Tuning the PID Controller, the D Gain Has a Different Sign from the I Gain
When you use PID Tuner to design a controller, the resulting derivative gain can have a different sign from the integral gain. PID Tuner always returns a stable controller, even if one or more gains are negative.
精选示例
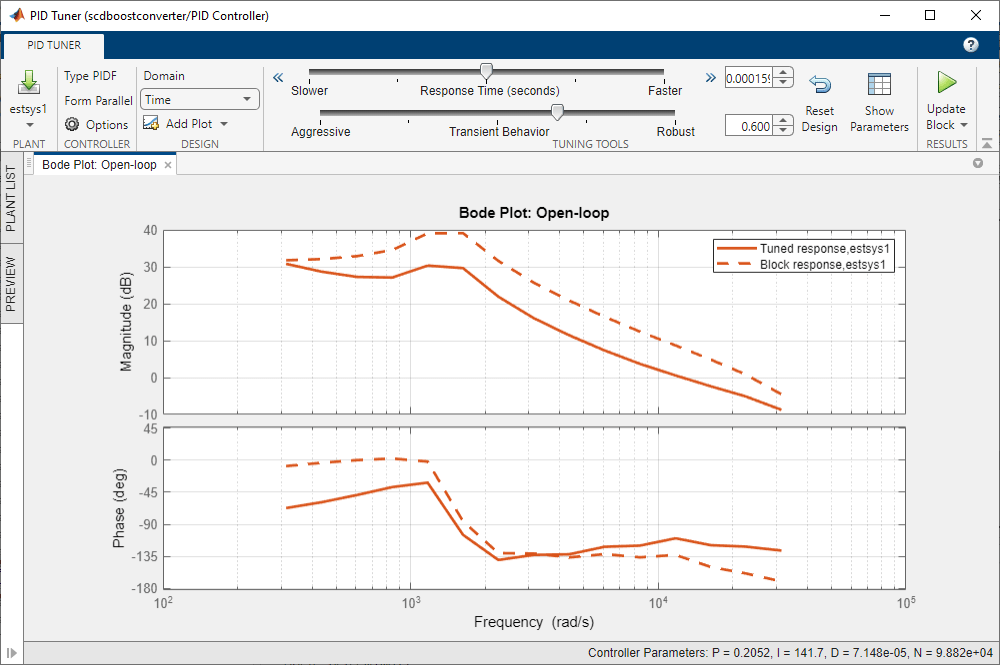
Design Controller for Boost Converter Model Using Frequency Response Data
To design a controller for a Simscape™ Electrical™ model that cannot be linearized, you can estimate the frequency response of your plant and import this estimated data into PID Tuner.

Design Controller for Vehicle Platooning
Tune spacing controller for trailing vehicles in a platoon using PID Tuner.
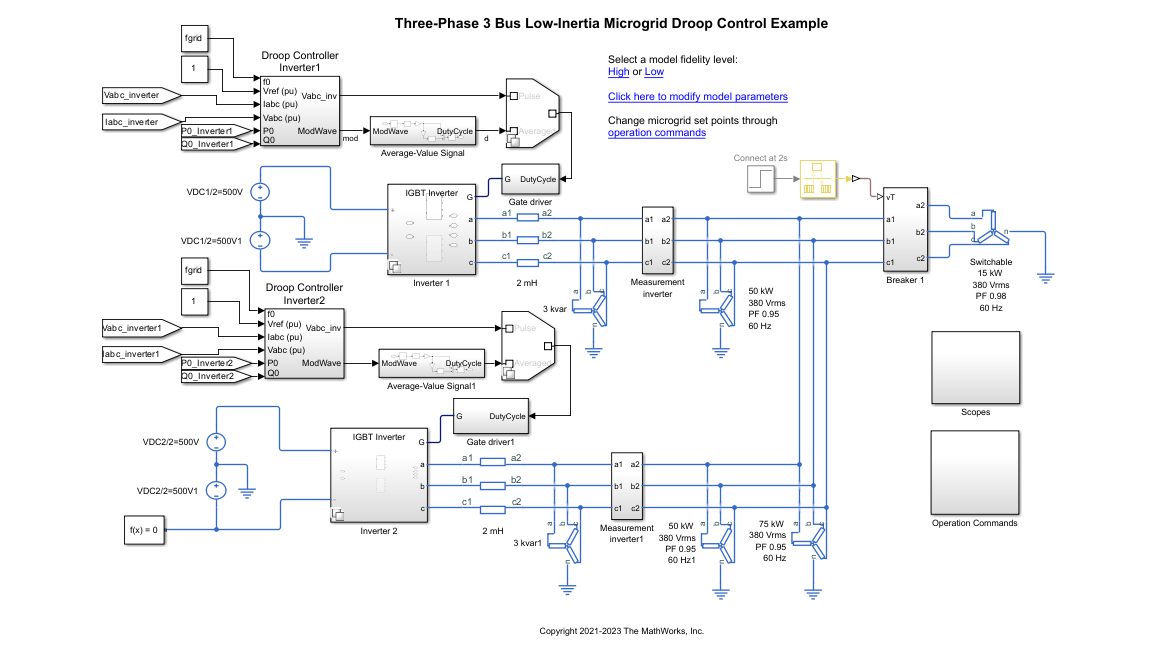
使用具有多个保真度级别的下垂控制器在孤岛模式下运行远程微网
为孤岛运行状态下的远程微网实现下垂控制方法。