实时 PID 自动调节
PID 自动调节可用于针对物理被控对象实时调节 PID 控制器。如果您有 Simulink® Coder™ 等代码生成产品,则可以生成在硬件上实现调节算法的代码,以允许您在环路中使用或不使用 Simulink 进行调节。要快速入门,请参阅PID 自动调节的工作原理。
模块
主题
PID 自动调节基础知识
- When to Use PID Autotuning
PID autotuning lets you tune a PID controller without a parametric plant model or an initial controller design. Deploy the algorithm to tune a controller in real time for a physical plant. - PID 自动调节的工作原理
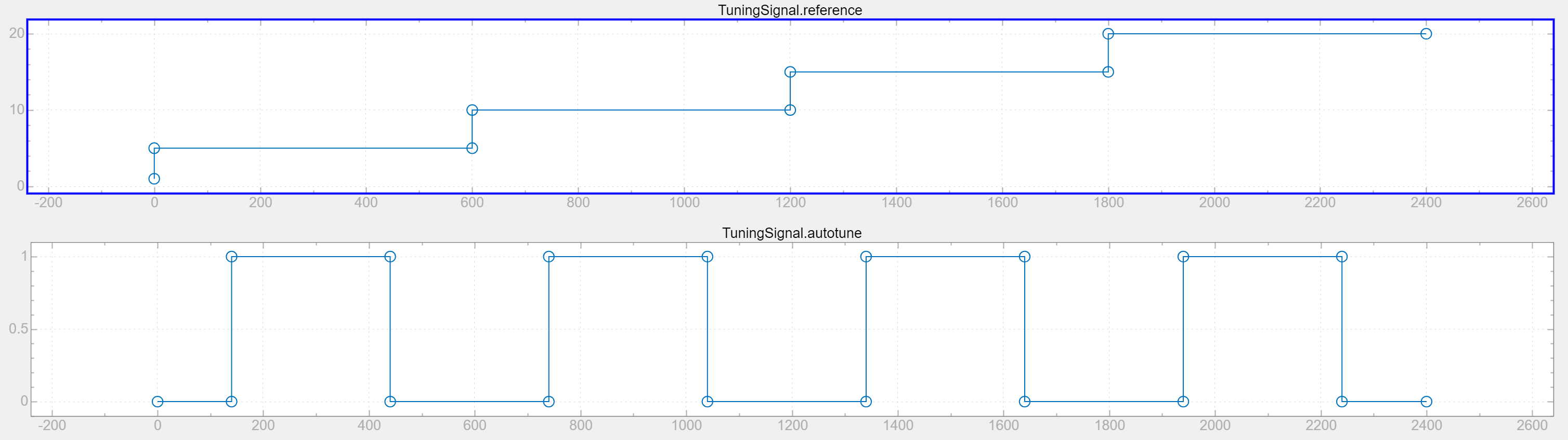
要使用 PID 自动调节,需配置并部署一个 PID 自动调节器模块。该模块向您的被控对象注入测试信号,并根据估计的频率响应调节 PID 增益。 - PID Autotuning for a Plant Modeled in Simulink
Use the PID autotuning algorithm to tune against a plant modeled in Simulink while the model is running. - PID Autotuning in Real Time
Deploy the PID autotuning algorithm as a standalone application for real-time tuning against your physical system. - Control Real-Time PID Autotuning in Simulink
Run the PID algorithm against your physical plant while controlling the tuning process in Simulink. - Tune PID Controller in Real Time Using Closed-Loop PID Autotuner Block
Tune a single-loop PID controller in real time by injecting sinusoidal perturbation signals at the plant input and measuring the plant output during a closed-loop experiment. - Tune PID Controller in Real Time Using Open-Loop PID Autotuner Block
Tune a single-loop PID controller in real time by injecting sinusoidal perturbation signals at the plant input and measuring the plant output during an open-loop experiment.
电机控制应用
- 使用级联 PI 控制器进行 BLDC 电机转速控制
使用 Closed-Loop PID Autotuner 模块调节在一个级联配置中的两个 PI 控制器。 - Tune Field-Oriented Controllers Using Closed-Loop PID Autotuner Block
Tune a field-oriented controller for a permanent magnet synchronous machine in one simulation. - Tune Field-Oriented Controllers for an Asynchronous Machine Using Closed-Loop PID Autotuner Block
Tune a field-oriented controller for an asynchronous machine in one simulation. - Tune Field-Oriented Controllers for a PMSM Using Closed-Loop PID Autotuner Block
Tune a field-oriented controller for a PMSM-based electrical-traction drive in one simulation. - Tune Gain-Scheduled Controller for PMSM Model Using Closed-Loop PID Autotuner Block
Use Closed-Loop PID Autotuner block to tune gain-scheduled PI controller for a PMSM model in one simulation. - Gain-Scheduled PID Autotuning Torque Control for a Nonlinear PMSM
Tune gain-scheduled PID controllers for d-axis and q-axis current loops of a nonlinear PMSM model. (自 R2024a 起) - 使用 Field Oriented Control Autotuner 调节 PI 控制器 (Motor Control Blockset)
此示例通过使用 Field Oriented Control Autotuner 模块计算转速和电流控制环中可用的 PI 控制器的增益值。有关此模块的详细信息,请参阅Field Oriented Control Autotuner (Motor Control Blockset)。有关磁场定向控制的详细信息,请参阅磁场定向控制 (Motor Control Blockset)。 - Tune PI Controllers Using Field Oriented Control Autotuner Block on Real-Time Systems (Motor Control Blockset)
Compute the gain values of PI controllers within the speed and current controllers by using the Field Oriented Control Autotuner block. - Tune PI Controllers (in Field-Weakening Control Mode) Using FOC Autotuner Block (Motor Control Blockset)
This example uses the Field Oriented Control Autotuner block to compute the gain values of the PI controllers available in the speed, current, and flux control loops of a field-weakening control algorithm.
精选示例

Design PID Controllers for Three-Phase Rectifier Using Closed-Loop PID Autotuner Block
Tune controllers for a Vienna-rectifier-based power factor corrector using the Closed-Loop PID Autotuner block.
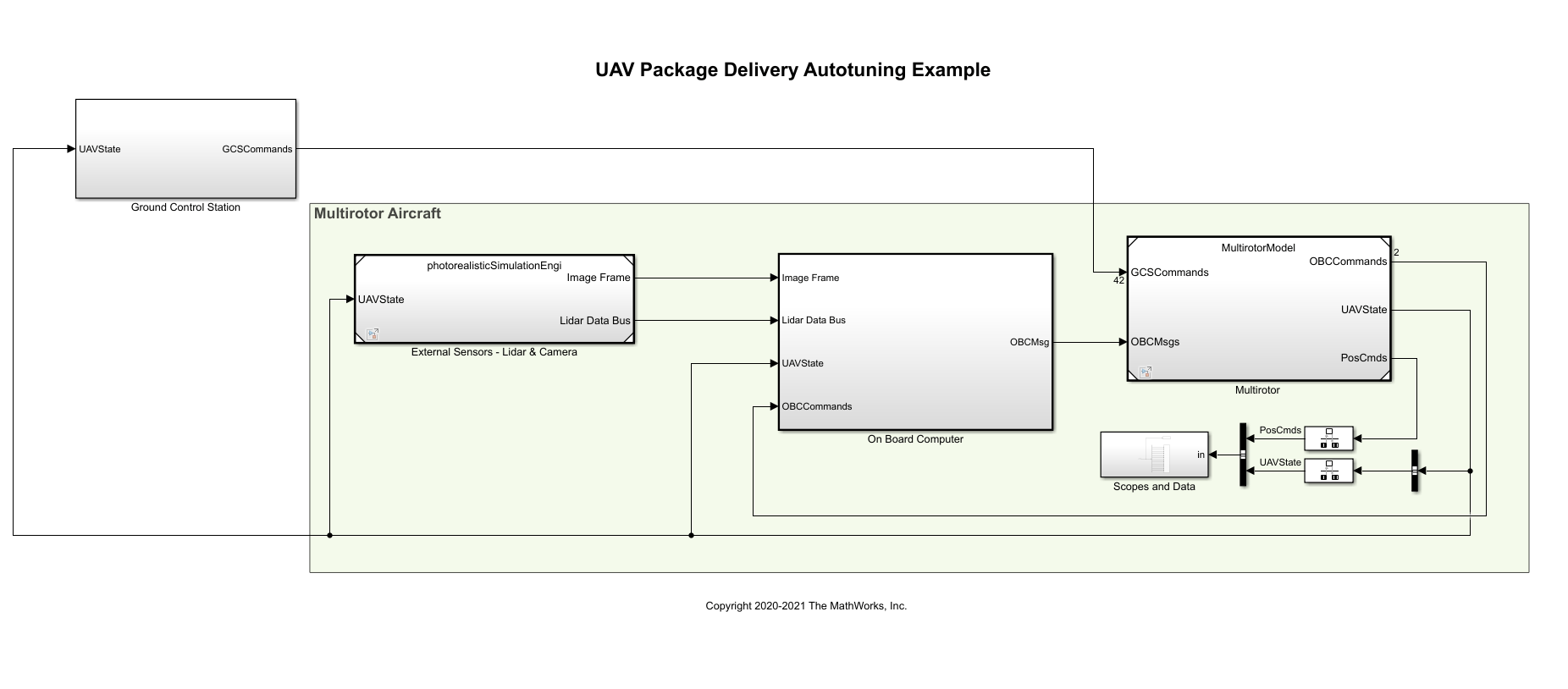
PID Autotuning for UAV Quadcopter
Tune attitude and position controllers for a UAV quadcopter in one simulation.
Tune Gain-Scheduled Controller Using Closed-Loop PID Autotuner Block
Use Closed-Loop PID Autotuner block to tune gain-scheduled PID controller for a water-tank model in one simulation.
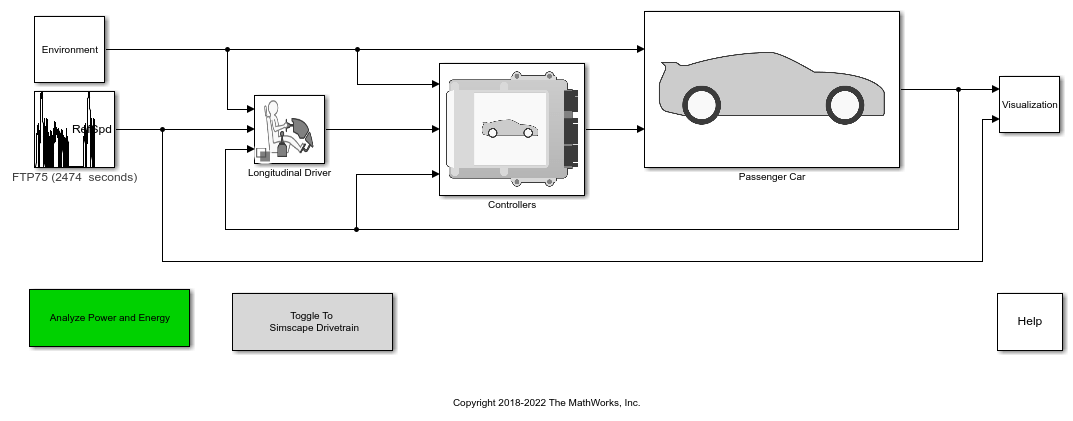
Driver Calibration using the Closed-Loop PID Autotuner
Automatically tune PID controller for a hybrid electric vehicle using Closed-Loop PID Autotuner.
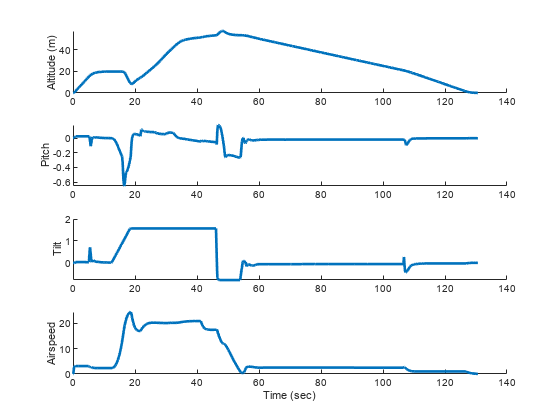
Gain-Scheduled PID Autotuning a VTOL UAV During Forward and Backward Transition
Tune gain-scheduled PID controller for VTOL UAV transitioning between operating modes.

Disable PID Autotuning in Presence of Downstream Signal Limiting
Disable the frequency response estimation process and prevent the PID gains from updating when the system encounters limitations.
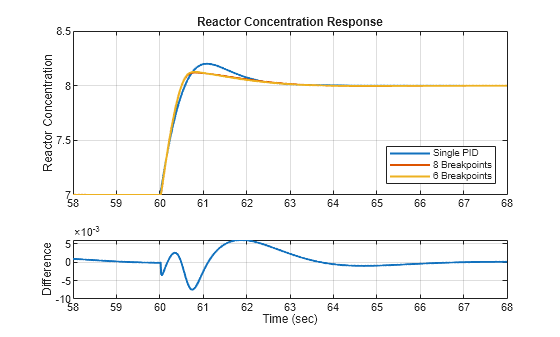
Use Visualization Plots to Refine Number of Breakpoints in Gain-Scheduled PID Autotuner
Automatically tune and validate a gain-scheduled controller for a chemical reactor using Gain-Scheduled PID Autotuner.