PID Gains Store and Update
Store and update tuned PID gains tuned using Closed-Loop PID Autotuner
Since R2023b
Libraries:
Simulink Control Design /
Autotuning
Description
The PID Gains Store and Update block lets you write the gains obtained from the Closed-Loop PID Autotuner block to a memory location or route them as a signal. Use this block to manage the gains obtained at various operating points during the autotuning process.
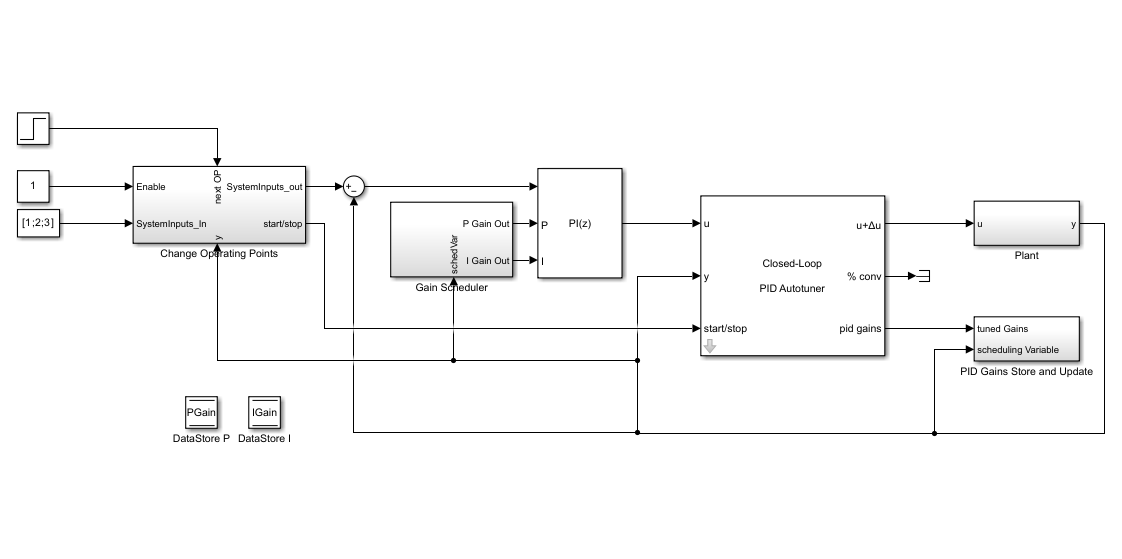
Typically, tuning a gain-scheduled controller is a complex process. It requires you to run multiple simulations for tuning at each operating point and provide a logic to store PID gains at that operating point. Using this block, along with the Change Operating Points and PID Gain Scheduler blocks, helps you implement a streamlined workflow for autotuning gain-scheduled PID controllers over an operating range in a single run. To do so, use this workflow.
Switch between predefined or snapshot operating point data during the simulation using the Change Operating Points block.
Perform autotuning at the operating points using Closed-Loop PID Autotuner.
Store the PID gains corresponding to the operating point in an array using PID Gains Store and Update block.
Perform lookup table based gain scheduling from the array using the PID Gain Scheduler block.
On a high level, you can use these blocks to implement the gain-scheduled workflow as shown in this diagram.
Ports
Input
Specify the tuned PID gain values to store and route. Typically, you obtain these tuned gains from the Closed-Loop PID Autotuner block.
This 4-element bus signal must contain the tuned PID gains
P, I, D,
and the filter coefficient N. These values correspond
to the P, I, D,
and N parameters in the expressions given in the
Controller type parameter. During autotuning,
initially, the values are 0, 0, 0, and 100, respectively. The
Closed-Loop PID Autotuner block updates the values
when the experiment ends. This bus signal always has four elements, even
if you are not tuning a PIDN controller.
Specify the scheduling variable. This signal indicates where in the operating range the system is at a given time.
This signal also dictates when the gains change in a gain-scheduled control application.
Dependencies
To enable this port, select Use for gain scheduling.
Since R2026a
Specify the second scheduling variable. This signal indicates where in the operating range the system is at a given time. The lookup tables use this signal to determine the value of the PID gains.
Dependencies
To enable this port, select Use for gain scheduling and Use two scheduling variables.
Breakpoint data for gain scheduling, specified as a vector.
Dependencies
To enable this port, select Use external signal.
Since R2026a
Breakpoint data for second scheduling variable, specified as a vector.
Dependencies
To enable this port, select Use external signal.
Control signal to trigger the update of gains.
Dependencies
To enable this port, set Method to trigger gain update to External trigger.
Output
Stored PID gain array. Use this gain array along with the breakpoint data to implement lookup table based gain scheduling.
Use this port to specify a custom logic to route the gain array.
To enable this port, set Method of storing gains to
Output from block.
Parameters
Specify the type of the PID controller in your system. The controller type indicates what actions are present in the controller. The following controller types are available:
P— Proportional onlyI— Integral onlyPI— Proportional and integralPD— Proportional and derivativePDN— Proportional and derivative with derivative filterPID— Proportional, integral, and derivativePIDN— Proportional, integral, and derivative with derivative filter
When you update a PID Controller block or custom PID controller with tuned parameter values, make sure the controller type matches.
Programmatic Use
Block Parameter:
ControllerType |
| Type: string |
Values:
"P" | "I" |
"PI" | "PD" |
"PDN" | "PID" |
"PIDN" |
Default:
"PID" |
Use this option to enable the block for gain-scheduling applications. Doing so allows you to specify breakpoints used with gain lookup.
Programmatic Use
Block Parameter:
UseGainScheduling |
| Type: string |
Value
"off" | "on" |
Default:
"on" |
Use this option to save breakpoints along with the stored gain array. The PID Gain Scheduler block can interpret this combined data for gain-scheduling applications.
Dependencies
To enable this parameter, select Use for gain scheduling.
Programmatic Use
Block Parameter:
SaveBreakpoints |
| Type: string |
Value
"off" | "on" |
Default:
"off" |
Since R2026a
Enable this option to use two scheduling variables for autotuning. This is helpful when you are tuning at a grid of design points based on two scheduling variables.
Specify the gain-scheduling breakpoint data.
Dependencies
To enable this parameter, select Use for gain scheduling.
Programmatic Use
Block Parameter:
GainArrayBreakpoints |
| Type: vector |
| Values: vector of at least two elements |
Default:
"[1 2 3]" |
Since R2026a
Specify the gain-scheduling breakpoint data.
Dependencies
To enable this parameter, disable Breakpoints saved in gain array.
Programmatic Use
Block Parameter:
GainArrayBreakpoints2 |
| Type: string |
| Values: vector of at least two elements |
Default:
"[1 2 3 4]" |
Specify the number of breakpoints in the external breakpoints signal.
Dependencies
To enable this parameter, select Use for gain scheduling and Use external signal.
Programmatic Use
Block Parameter:
NumBreakpoints |
| Type: scalar |
| Values: positive scalar |
Default:
3 |
Specify breakpoints from the block input port.
Dependencies
To enable this parameter, select Use for gain scheduling.
Programmatic Use
Block Parameter:
UseExternalBreakpoints |
| Type: string |
Value
"off" | "on" |
Default:
"off" |
Specify the tolerance between the scheduling variable and the breakpoints. To determine which breakpoint to update in the array, the block compares the scheduling variable with the breakpoint array and uses this tolerance value to determine the closest value.
Dependencies
To enable this parameter, select Use for gain scheduling.
Programmatic Use
Block Parameter:
GainIndexTolerance |
| Type: scalar |
| Values: nonnegative scalar |
Default:
1e-3 |
Specify the method of storing gains.
Data store memory— Use Data Store Memory blocks to store the gains. To create the data store blocks, first specify a name for the data store using Parameter Name parameter for each gain, then click the Add Data Store Memory blocks to model button. The PID Gains Store and Update block creates Data Store Memory blocks in the top-level of the model. You can specify these data store names directly in the PID Gain Scheduler block to perform lookup table based gain scheduling.Goto/from— Use Goto and From blocks to route the gains. To specify a Goto tag, use the Parameter Name parameter for each gain. You can specify these Goto tags directly in the PID Gain Scheduler block to read and lookup the gains.Output from block— Use the PID Gains Out output port. You can feed this output signal directly into the PID Gain Scheduler block.
Use the Gain initial conditions parameters to specify the initial values of gains. The block uses the initial values when the tuned gained are not available.
Programmatic Use
Block Parameter:
TriggerUpdateMethod |
| Type: string |
Values:
"Data store memory" |
"Goto/from" | "Output from
block" |
Default:
"Data store memory" |
Specify the name of the data store or goto tag for the proportional gain data.
Dependencies
To enable this parameter, set
Controller type to a controller type that has proportional action.
Method of obtaining gains to
Data store memoryorGoto/from.
Programmatic Use
Block Parameter:
StoreGainsPParamName |
| Type: string |
Default:
"PGain" |
Specify the initial value of the proportional gain as a scalar or vector. The block uses this value when tuned gains data from the external sources (like Closed-Loop PID Autotuner) is not available.
Scalar — The block uses this value for all breakpoints.
Vector — Specify a vector of same length as Breakpoints. The block uses the initial value at the index corresponding to the current breakpoint.
Dependencies
To enable this port, set Controller type to a controller type that has proportional action.
Programmatic Use
Block Parameter:
PGainInitialConditions |
| Type: scalar | vector |
| Default: 0 |
Specify the name of the data store or goto tag for the integral gain data.
Dependencies
To enable this parameter, set
Controller type to a controller type that has integral action.
Method of obtaining gains to
Data store memoryorGoto/from.
Programmatic Use
Block Parameter:
StoreGainsIParamName |
| Type: string |
Default:
"IGain" |
Specify the initial value of the integral gain as a scalar or vector. The block uses this value when tuned gains data from the external sources (like Closed-Loop PID Autotuner) is not available.
Scalar — The block uses this value for all breakpoints.
Vector — Specify a vector of same length as Breakpoints. The block uses the initial value at the index corresponding to the current breakpoint.
Dependencies
To enable this port, set Controller type to a controller type that has integral action.
Programmatic Use
Block Parameter:
IGainInitialConditions |
| Type: scalar | vector |
| Default: 0 |
Specify the name of the data store or goto tag for the derivative gain data.
Dependencies
To enable this parameter, set
Controller type to a controller type that has derivative action.
Method of obtaining gains to
Data store memoryorGoto/from.
Programmatic Use
Block Parameter:
StoreGainsDParamName |
| Type: string |
Default:
"DGain" |
Specify the initial value of the derivative gain as a scalar or vector. The block uses this value when tuned gains data from the external sources (like Closed-Loop PID Autotuner) is not available.
Scalar — The block uses this value for all breakpoints.
Vector — Specify a vector of same length as Breakpoints. The block uses the initial value at the index corresponding to the current breakpoint.
Dependencies
To enable this port, set Controller type to a controller type that has derivative action.
Programmatic Use
Block Parameter:
DGainInitialConditions |
| Type: scalar | vector |
| Default: 0 |
Specify the name of the data store or goto tag for the derivative filter gain data.
Dependencies
To enable this parameter, set
Controller type to a controller type that has a filtered derivative.
Method of obtaining gains to
Data store memoryorGoto/from.
Programmatic Use
Block Parameter:
StoreGainsNParamName |
| Type: string |
Default:
"NGain" |
Specify the initial value of the derivative filter gain as a scalar or vector. The block uses this value when tuned gains data from the external sources (like Closed-Loop PID Autotuner) is not available.
Scalar — The block uses this value for all breakpoints.
Vector — Specify a vector of same length as Breakpoints. The block uses the initial value at the index corresponding to the current breakpoint.
Dependencies
To enable this port, set Controller type to a controller type that has a filtered derivative.
Dependencies
To enable this parameter, set Method of storing
gains to Data store memory or
Goto/from.
Programmatic Use
Block Parameter:
NGainInitialConditions |
| Type: scalar | vector |
| Default: 100 |
Specify the method to trigger gain update.
Detect change in PID gains — Update the gains automatically when there is a change in the input gains.
External trigger — Use an external signal to trigger the gains update.
Programmatic Use
Block Parameter:
TriggerUpdateMethod |
| Type: string |
Values:
"Detect change in PID gains" | "External
trigger"
|
Default:
"Detect change in PID gains" |
Number of samples to delay the gains update following the trigger event. Use this option to delay updating the gains in order to give the autotuning algorithm enough time to calculate the gains.
Programmatic Use
Block Parameter:
NumUpdateDelays |
| Type: scalar |
| Values: nonnegative scalar |
Default:
1 |
Specify the sample time. In your autotuning applications, this sample time must match with the controller sample time specified in the PID Controller and Closed-Loop PID Autotuner blocks.
Programmatic Use
Block Parameter:
SampleTime |
| Type: scalar |
| Values: positive scalar | –1 |
Default:
–1 |
Specify the floating-point precision based on simulation environment or hardware requirements.
Programmatic Use
Block Parameter:
BlockDataType |
| Type: string |
Values:
"Double" | "Single"
|
Default:
"Double" |
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2023bYou can now use the Gain-Scheduled PID Autotuner, PID Gain Scheduler, PID Gains Store and Update blocks to automatically tune gains with two scheduling variables. This is useful when tuning over a grid of design points defined by multiple operating conditions. To use two scheduling variables, enable Use two scheduling variables in the block parameters and specify the corresponding scheduling signals and breakpoint data.
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
选择网站
选择网站以获取翻译的可用内容,以及查看当地活动和优惠。根据您的位置,我们建议您选择:。
您也可以从以下列表中选择网站:
如何获得最佳网站性能
选择中国网站(中文或英文)以获得最佳网站性能。其他 MathWorks 国家/地区网站并未针对您所在位置的访问进行优化。
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)