Tune PID Controller in Real Time Using Closed-Loop PID Autotuner Block
This example shows how to use the Closed-Loop PID Autotuner block to tune a PID controller for a boost converter plant in both simulation and real time.
Closed-Loop PID Autotuner Block
The Closed-Loop PID Autotuner block allows you to tune a single-loop PID controller in both simulation and real time. The block injects sinusoidal perturbation signals at the plant input and measures the plant output during a closed-loop experiment. When the experiment stops, the block computes PID gains based on the plant frequency responses estimated near the desired bandwidth.
The Closed-Loop PID Autotuner block supports two typical PID tuning scenarios in real-time applications.
Deploy the block on hardware and use it in a standalone real-time application, without the presence of Simulink®.
Deploy the block on hardware but monitor and manage the real-time tuning process in Simulink, using external simulation mode. External mode allows communication between the Simulink block diagram running on the host computer and the generated code running on the hardware.
This example focuses on the first scenario, deploying the block to perform the real-time tuning.
Simulink Control Design™ software also provides an Open-Loop PID Autotuner block for real-time PID tuning. The main difference between the two autotuner blocks is that the Open-Loop PID Autotuner block carries out the experiment with the feedback loop open (that is, the existing controller is not in action). To decide which autotuner block is best for your application, consider the following points:
If you do not have an initial controller, use the Open-Loop PID Autotuner block to obtain one. You can continue using it to retune the controller or replace it with the Closed-Loop PID Autotuner block.
If you have an initial controller, use the Closed-Loop PID Autotuner block for retuning. The major benefits are: (1) if there is an unexpected disturbance during the experiment, it is rejected by the existing controller to ensure safe operation; (2) the existing controller keeps the plant running near its nominal operating point by suppressing the perturbation signals as well.
Voltage-Mode Controlled Boost Converter
In this example, a voltage-mode boost converter is modeled in Simulink using Simscape™ Electrical™ components. The parameters of these components are based on [1].
mdl = 'scdboostconverterPIDTuningMod';
open_system(mdl)

A boost converter circuit converts a DC voltage to another, typically higher, DC voltage by controlled chopping or switching of the source voltage. In this model, a MOSFET driven by a pulse-width modulation (PWM) signal is used for switching. A digital PID controller adjusts the PWM duty cycle to maintain the load voltage  at its reference
at its reference  .
.
At the nominal operating point, the load voltage is 18 volts and the duty cycle is about 0.74. The duty cycle can vary from 0.1 to 0.85 during boost converter operation.
The existing PID controller has gains of P = 0.02, I = 160, D = 0.00005, and N = 20000. These gains are stored in a Data Store Memory block and provided externally to the PID Controller block. Having external gain input ports allows you to change the values after new gains are computed by the Closed-Loop PID Autotuner block.
Connect Autotuner Block with Plant and Controller
Insert the Closed-Loop PID Autotuner block between the PID Controller block and the plant, as shown in the boost converter model. The start/stop signal starts and stops the closed-loop experiment. When no experiment is running, the Closed-Loop PID Autotuner block behaves like a unity gain block, where the u signal passes directly to u+Δu.
When using the Closed-Loop PID Autotuner block in either simulation or real-time applications, consider the following points.
The plant must be either asymptotically stable (all poles strictly stable) or integrating. The autotuner block does not work with an unstable plant.
The feedback loop with the existing controller must be stable.
To estimate plant frequency responses more accurately in real time, minimize the occurrence of any load disturbance in the plant during the experiment. The autotuner block expects the plant output to be the response to the injected perturbation signals only, and load disturbances distort this output.
Because the feedback loop is closed during the experiment, the existing controller suppresses the injected perturbation signals as well. The advantage of using closed-loop experiment is that the controller keeps the plant running near the nominal operating point and maintains safe operation. The disadvantage is that it reduces the accuracy of frequency response estimation if your target bandwidth is far away from the current bandwidth.
Configure Autotuner Block
After properly connecting the Closed-Loop PID Autotuner block with the plant model and PID Controller block, use the block parameters to specify tuning and experiment settings.
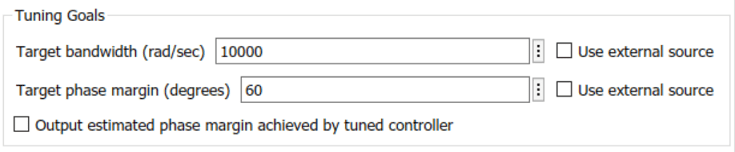
On the Tuning tab, there are two main tuning settings.
Target bandwidth: Determines how fast you want the controller to respond. In this example, choose
10000rad/sec, which is typical for a boost converter.Target phase margin: Determines how robust you want the controller to be. In this example, choose the default value of
60degrees.
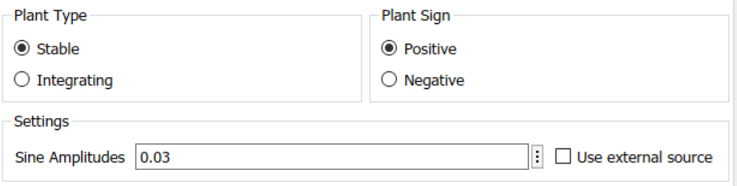
On the Experiment tab, there are three main experiment settings.
Plant Type: Specifies whether the plant is asymptotically stable or integrating. In this example, the boost converter plant is stable.
Plant Sign: Specifies whether the plant has a positive or negative sign. The plant sign is positive if a positive change in the plant input at the nominal operating point results in a positive change in the plant output when the plant reaches a new steady state. Otherwise, the plant sign is negative. If a plant is stable, plant sign is equivalent to the sign of its DC gain. If a plant is integrating, the plant sign is positive or negative if the plant output keeps increasing or decreasing, respectively. In this example, the boost converter plant has a positive plant sign.
Signal Amplitudes: Specifies amplitudes of the injected signal. In this example, choose
0.03for all five frequencies of the perturbation signal to ensure the plant is properly excited within the saturation limit. If the excitation amplitude is too large, the boost converter operates in discontinuous-current mode. If the input amplitude is too small, the sinusoidal signals are indistinguishable from ripples in the power electronics circuits. Both situations produce inaccurate frequency response estimation results.
Simulate Autotuner Block in Normal Mode
If you have a plant model built in Simulink, it is recommended to simulate the Closed-Loop PID Autotuner block against the plant model in normal mode before deploying it for real-time tuning. Simulation helps you identify issues with signal connections and block settings so that you can adjust them before generating code.
Simulation of the boost converter plant usually takes a few minutes because of the fast sample time of the PWM generator. Vout is the plant output and Duty Cycle is the plant input.
sim(mdl)
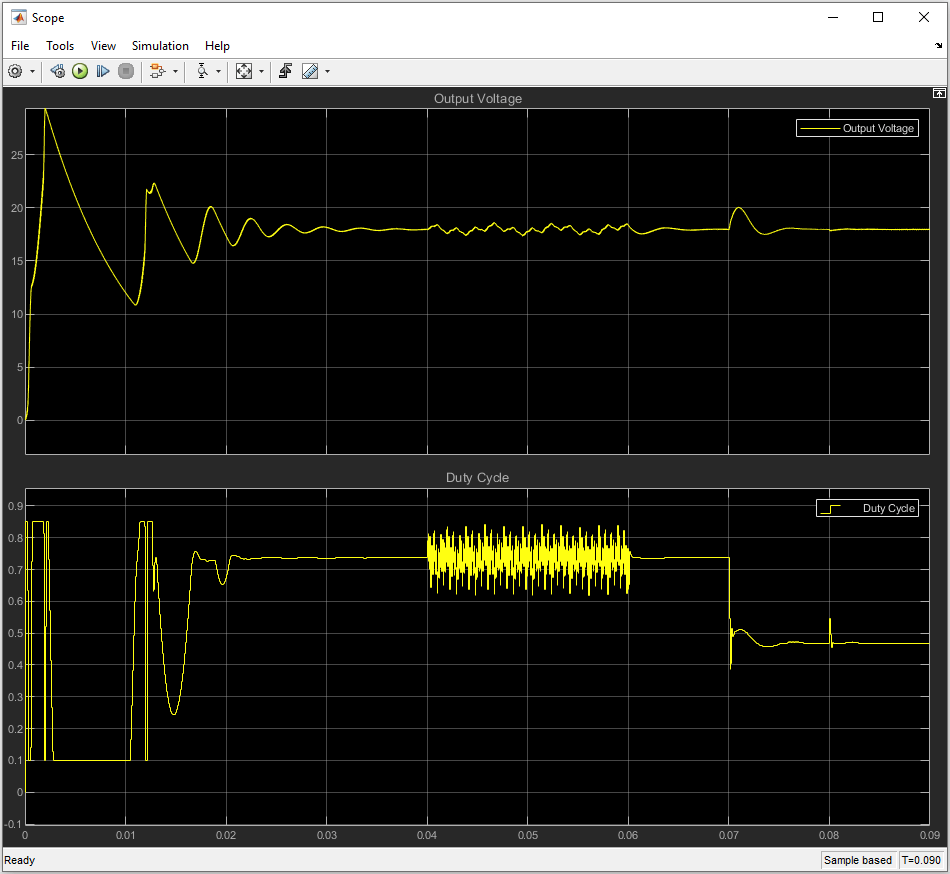
In this example, it takes the PID controller about 0.04 seconds to bring the boost converter to the nominal operating point of 18 volts. The initial transient contains strong oscillations, which indicates that the existing controller must be retuned.
At 0.04 seconds, the autotuning process starts. The experiment lasts 0.02 seconds, because the number of seconds it takes for the online frequency response estimation to converge is about 200 divided by the bandwidth.
For a different nominal operating point, it can take a longer time for the boost converter to reach the reference voltage. You must modify the start/stop time signal such that the autotuning process always starts from the nominal operating point.
When PID tuning stops at 0.06 seconds, the block calculates new gains, P = 0.04, I = 100, D = 0.00006, and N = 30000. The new gains are immediately written to the data store memory and sent to the external gain input ports of the PID Controller block, which overwrites the original gains.
The model has a line disturbance (Vin from 5V to 10V) and a load current disturbance (Load from 6A to 3A), which occur at 0.07 and 0.08 seconds, respectively. You can use these disturbances to examine controller performance.
Use PRBS Experiment Mode
Besides the traditional sinusoidal perturbation signals, the block also provides an option to use the pseudo random binary sequence (PRBS) signals for the frequency response estimation experiment.
To use PRBS as the experiment mode, adjust the signal amplitude from the original 0.03 to a smaller 0.022. The autotuning process starts at 0.04 seconds and the experiment lasts for 0.021 seconds, as shown in the Description section on the Experiment tab.
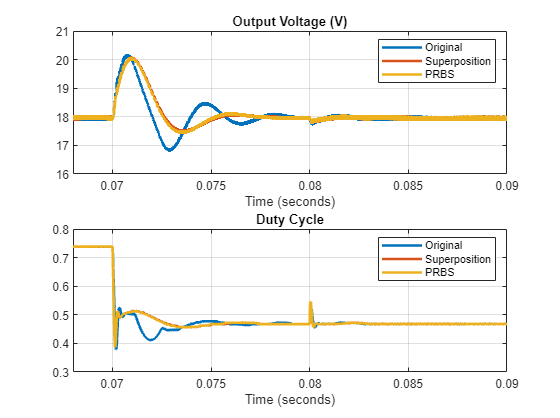
Keep the other tuning settings unchanged and run the model. The new PID gains are, P = 0.054, I = 111.1, D = 0.00007, and N = 30000. When PID tuning stops at 0.061 seconds, the model updates the new gains in the PID Controller block.
The new set of PID gains provide an improved closed-loop response with much less oscillation. Since the tuned PID gains are similar using the Superposition and PRBS experiment modes, the responses are also identical.
Use Autotuner Block in Standalone Application
To tune a PID controller against a physical boost converter in a standalone real-time application, you must generate C/C++ code from the Closed-Loop PID Autotuner block and deploy it on your hardware.
You can change the following tunable parameters at run time.
PID controller type
PID controller form
PID integrator and filter methods (discrete time only)
Target bandwidth
Target phase margin
Plant type
Plant sign
Amplitudes of signal
The sample time of the Closed-Loop PID Autotuner block is not a tunable parameter. To use the autotuner block with a different sample time without recompiling the model, set the Controller sample time parameter of the block to -1 and put the autotuner block inside a triggered subsystem. Doing so runs the autotuner at the sample time of the triggered subsystem.
close_system(mdl,0)
References
[1] Lee, S. W. "Practical Feedback Loop Analysis for Voltage-Mode Boost Converter." Application Report No. SLVA633. Texas Instruments. January 2014. www.ti.com/lit/an/slva633/slva633.pdf