使用具有多个保真度级别的下垂控制器在孤岛模式下运行远程微网
此示例展示使用 Simscape™ Electrical™ 组件在 Simulink® 中建模的远程微网的孤岛运行。此示例演示具有下垂控制的最简单的构网控制器。
远程微网模型
远程微网通常用于向未连接到主电网的地方的电力负荷供电。由于主电网无法平衡负荷变化,因此控制这样的低惯量微网具有挑战性。
此示例中的微网由两个逆变器子系统组成,它们连接到两个不同的公共耦合点 (PCC) 总线。微网最初与固定负荷达到功率平衡,同时,还有一个可切换负荷也连接到该微网。一个微网通常有一个预先计划的负荷削减策略以达到平衡运行。在远程微网中,很难实现即时负荷削减。在此示例中,没有高级能量管理系统,因此使用下垂控制将微网频率和电压保持在其标称值(分别为 60 Hz 和 380 Vrms)附近。
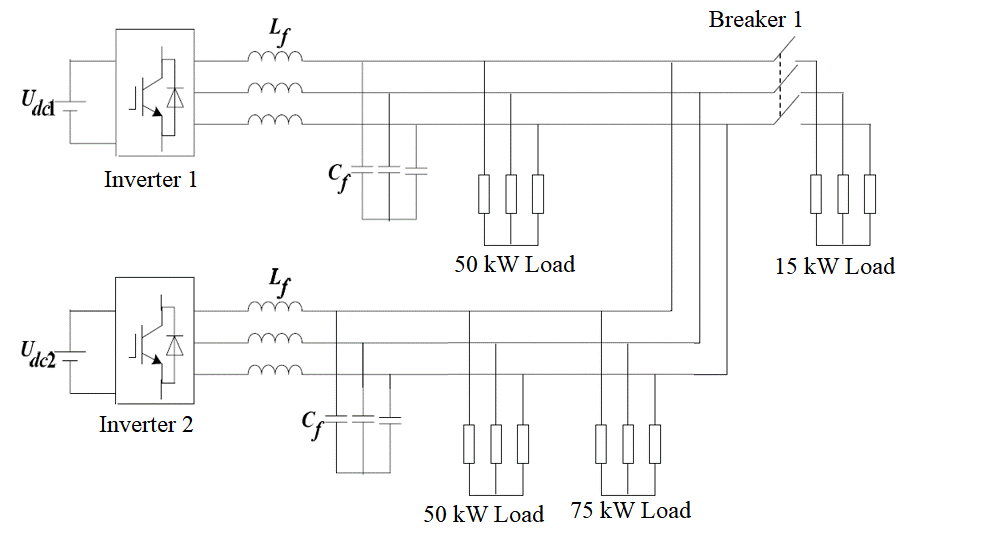
在此微网图中,每个逆变器子系统都与一个理想的 DC 电源连接,以表示一个典型的可再生能源发电系统(如光伏阵列、风力发电机或电池储能系统)的 DC 链路。每个子系统都包括一个下垂控制器以用于计算 d 轴和 q 轴参考电压。电压控制器通过生成馈入逆变器的开关序列来调节电压。最初连接的负荷共消耗 175 kW AC 电力,功率因数为 0.95。
下垂控制
下垂 P/F 设置为 2.5%,即随着逆变器注入的实际功率发生 1 p.u. 的变化,允许微网频率变化 1.5 Hz。下垂 Q/V 也设置为 2.5%,即随着无功功率发生 1 p.u. 的变化,允许每个 PCC 总线上的微网电压在标称 380 Vrms 上下 9.5 Vrms 范围内变化。
微网模型
打开模型。
mdl = 'scd3busMicrogridDroopControlFidelityLevels';
open_system(mdl)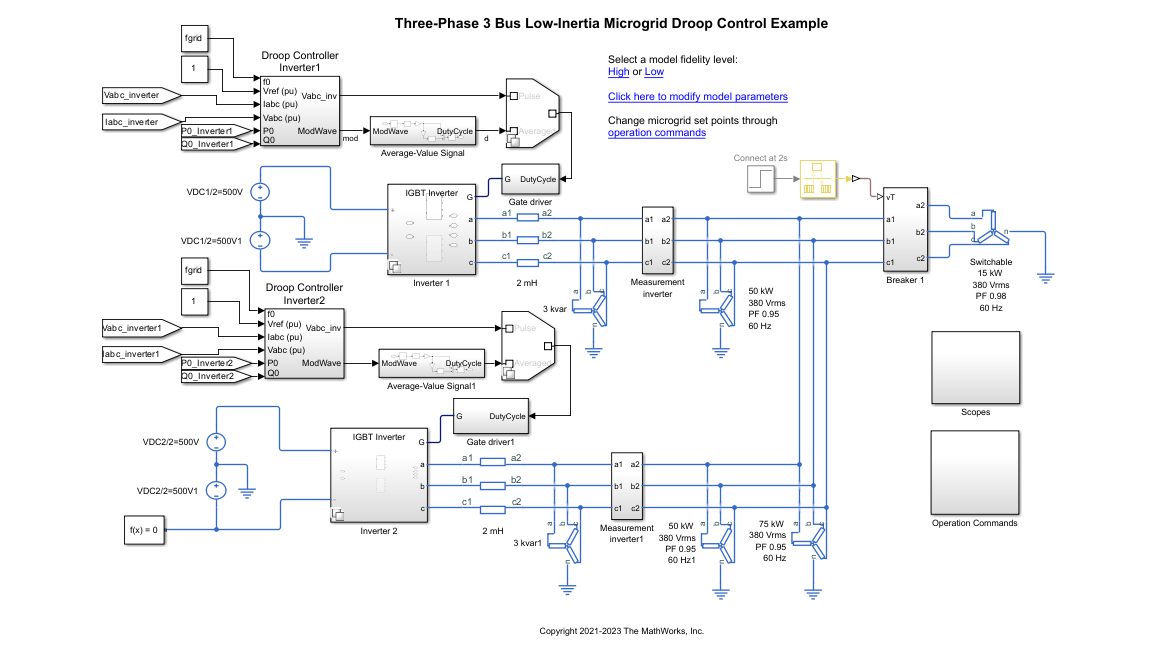
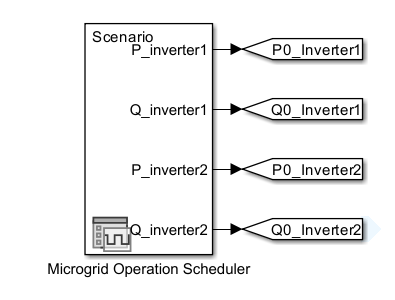
微网连接到两个单独的 DC 电源,每个 DC 电源的标称电压为 1000 V。在仿真开始时,微网中的总负荷为 175 kW。在 2 秒处,消耗 15 kW 实际功率、功率因数为 0.98 的负荷通过断路器 Breaker 1 接入微网。微网的运行,包括全部两个逆变器的实际功率和视在功率消耗,是使用加载到 Operation Commands 子系统内的 Signal Editor 模块中的场景进行调度的。
模型保真度级别
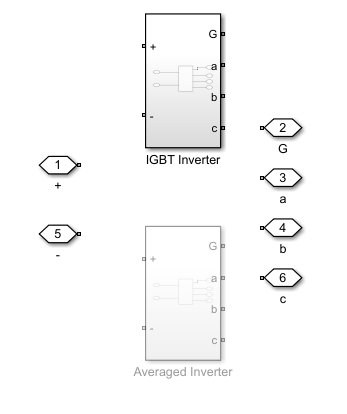
根据您的需要,您可以在低保真度或高保真度下仿真逆变器开关行为。Inverter 子系统中的活动变体确定保真度级别。
高保真模式
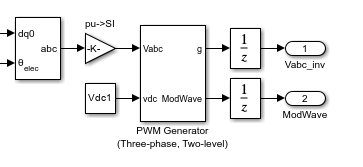
在高保真模式下,PWM Generator 模块生成一个开关导通信号 g。然后,此信号会馈入逆变器的门控输入端 G。
高保真模式单独对逆变器中的所有开关进行建模和仿真。默认情况下,开关是 IGBT 模型。您可以使用 Converter (Three-Phase) 模块中的开关设备参数更改开关模型。
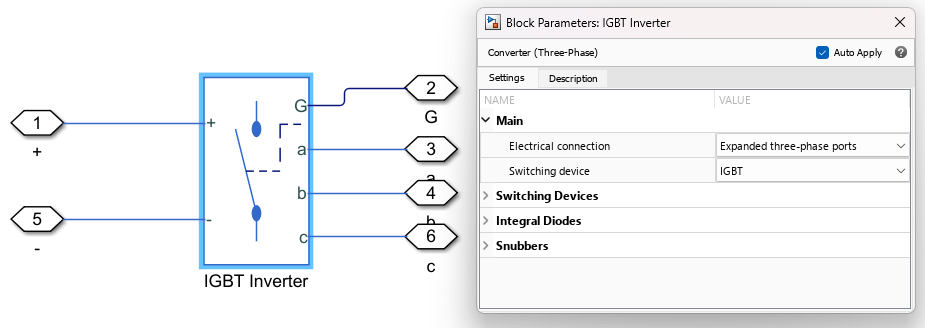
此级别的开关仿真能够非常详细地表现逆变器的行为,并捕获输出电压和频率的任何微小变化。然而,由于高保真模式对逆变器中每个开关的行为进行建模,导致仿真时间更长。因此,当您有兴趣仔细分析系统响应特征(如电压或频率波纹)且仿真时间不是最优先考虑的因素时,使用高保真模型是非常好的方法。
低保真模式
在低保真模式下,Converter (Three-Phase) 模块的开关设备参数设置为 Averaged Switch,它使用平均 PWM 逆变器模型,而不是对每个单独的开关进行完全建模。
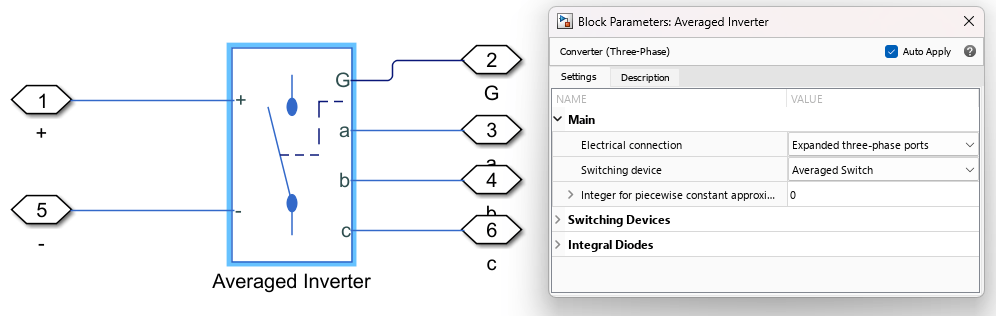
平均 PWM 模型的工作原理是使用由 PWM Generator (Three-phase, Two-level) 模块输出的调制波形,并将该调制波形从范围 [–1,1] 转换为范围 [0,1] 内的占空比信号。当低保真模式激活时,此占空比信号将代替开关信号作为逆变器门输入。

该模型在 Average-Value Signal 子系统中执行占空比转换。

由于开关不是在此模式下建模的,因此允许仿真步大于开关周期,从而实现更快的仿真。然而,这也会导致电压和频率波纹无法完全捕获这样的现象。由于低保真模型仿真速度更快,但不能完全表示所有逆变器行为,因此它最适用于要快速连续运行并且主要对系统的高级别操作(例如尝试不同控制器设计迭代)感兴趣的仿真情况。
仿真
要更改活动的保真度级别,请在 Simulink 模型中的选择模型保真度级别下,点击低或高。默认情况下模型设置为高保真模式,因此会先在此模式下仿真模型。您可以使用此示例附带的 scd3busMicrogridDroopControlDataFidelityLevels.m 脚本来更改模型参数。此外,要分别更改逆变器实际功率和视在功率设定点 P 和 Q,请在 Signal Editor 模块中编辑激活场景。
要观察仿真结果,请打开逆变器频率和电压示波器。
open_system([mdl,'/Scopes/Inverter Freq']); open_system([mdl,'/Scopes/Voltage']);
高保真仿真
首先,执行一次模型更新。
set_param(mdl,'SimulationCommand','update');
在高保真模式下对模型进行仿真并计时(这可能需要几分钟,具体取决于您的系统)。
tic;
sim(mdl);
highFidelitySimTime = toc;
highFidelityLogs = logsout;
fprintf("High fidelity simulation took %.2f seconds\n", highFidelitySimTime)High fidelity simulation took 394.30 seconds
在 2 秒处负荷突然增大后,微网在每个逆变器的 PCC 处保持其频率在 60 Hz 左右,电压在 1 p.u. 左右。您可以在 Active and Reactive Power 示波器中看到,两个电源分担了增大的实际功率和无功功率负荷。逆变器实际功率和无功功率的调节无需使用任何高级监督控制。
open_system([mdl,'/Scopes/Active & Reactive Power']);低保真度仿真
现在,将模型设置为低保真模式。
fidelity = scd3busMicrogridDroopControl_variants_enum.Low; Ts = 5e-5; Ts_V = 1e-5; Tsc = 1e-3; Tsc_V = 5e-3;
执行一次模型更新。
set_param(mdl,'SimulationCommand','update');
对模型进行仿真并计时。
tic; sim(mdl); lowFidelitySimTime = toc; lowFidelityLogs = logsout; timeDifference = highFidelitySimTime/lowFidelitySimTime; fprintf("Low fidelity simulation took %.2f seconds, which is \n%.1f " + ... "times faster than high fidelity.\n", lowFidelitySimTime, timeDifference);
Low fidelity simulation took 35.11 seconds, which is 11.2 times faster than high fidelity.
从平均表现来看,低保真模型显示出与高保真模型非常相似的结果,但没有显示在高保真模式下出现的电压和频率波形中的波纹。
仿真结果比较
绘制低保真度模型和高保真模型的逆变器频率。
figure;
tiledlayout(2,1)
nexttile
plot(highFidelityLogs{12}.Values)
hold on
plot(lowFidelityLogs{12}.Values)
hold off
ylabel('Frequency (Hz)')
ylim([58 62])
title('Inverter1 Frequency')
legend(["High fidelity", "Low fidelity"])
nexttile
plot(highFidelityLogs{10}.Values)
hold on
plot(lowFidelityLogs{10}.Values)
hold off
ylabel('Frequency (Hz)')
ylim([58 62])
title('Inverter2 Frequency')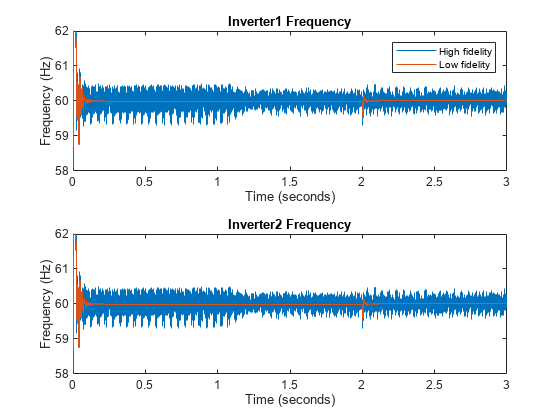
现在绘制这两种模型的逆变器的标幺电压。
figure;
tiledlayout(2,1)
nexttile
plot(highFidelityLogs{13}.Values)
hold on
plot(lowFidelityLogs{13}.Values)
hold off
ylabel('Voltage (p.u.)')
ylim([0.9 1.2])
title('Inverter1 Voltage')
legend(["High fidelity", "Low fidelity"])
nexttile
plot(highFidelityLogs{11}.Values)
hold on
plot(lowFidelityLogs{11}.Values)
ylabel('Voltage (p.u.)')
ylim([0.9 1.2])
title('Inverter2 Voltage')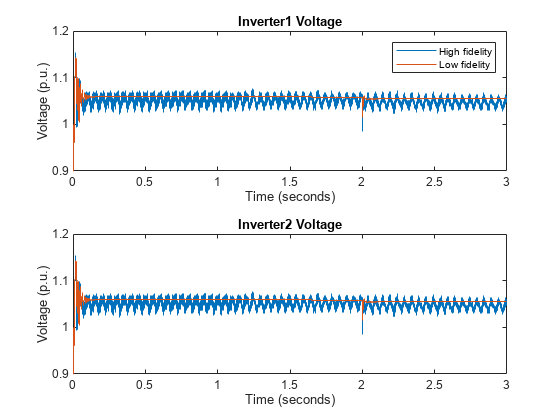
与预期相符,高保真模型捕获到的频率和电压波纹要详细得多,但低保真模型的运行速度要快得多。
控制设计注意事项
请注意,无论使用何种保真度级别,每个 PCC 上的频率波形和电压波形都存在振荡。这一结果并不令人惊讶,因为下垂控制方法是一种用于微网的简单构网控制器。如果将储能设备和可再生能源的动态特性考虑在内的话,这种振荡可能会更加严重。为了改进微网中的电能质量,可以采用更高级的方法,如同步机器模拟和虚拟振荡器控制。您可以基于下垂控制器架构实现许多这样的构网控制器。
逆变器控制器还包含电压控制器。您可以进一步调节电压 PI 控制器,以实现更好的 d 轴和 q 轴参考电压跟踪性能。有关如何使用 PID 调节器调节控制器的示例,请参阅Design PID Controller Using Simulated I/O Data。
关闭模型
关闭模型而不保存。
close_system(mdl,0)
Copyright 2021-2023 The MathWorks, Inc.