PID 调节器
调节 PID 控制器
说明
PID 调节器会自动调节 SISO 被控对象的 PID 控制器的增益,以实现性能和稳健性之间的平衡。您可以指定控制器类型,例如 PI、带导数滤波器的 PID 或二自由度 (2-DOF) PID 控制器。分析图可用于在时域和频域中检查控制器性能。您可以通过交互方式细化控制器的性能,以调整环路带宽和相位裕度,或者支持设定点跟踪或抗扰。
您可以将 PID 调节器用于由数值 LTI 模型表示的被控对象,如传递函数 (tf) 或状态空间 (ss) 模型。如果您有 Simulink® Control Design™ 软件,可以使用 PID 调节器来调节 Simulink 模型中的 PID Controller 或 PID Controller (2DOF) 模块。如果您有 System Identification Toolbox™ 软件,可以使用该 App 根据测得或仿真的数据来估计被控对象,并为估计的被控对象设计控制器。
实时编辑器中的交互式调节
有关实时编辑器中的交互式 PID 调节,请参阅调节 PID 控制器实时编辑器任务。此任务可以交互方式设计 PID 控制器,并为实时脚本自动生成 MATLAB® 代码。
打开 PID 调节器 App
MATLAB 工具条:在 App 选项卡上的控制系统设计和分析下,点击 App 图标。
MATLAB 命令提示符:输入
pidTuner。Simulink 模型:在 PID Controller 或 PID Controller (2DOF) 模块对话框中,点击调节。
示例
- 调节 PID 控制器以侧重参考跟踪或抗扰(PID 调节器)
- Simulink 中的 PID 控制器调节 (Simulink Control Design)
- 用 PID 调节器设计 PID 控制器
- Simulink 中基于模型的 PID 调节简介 (Simulink Control Design)
参数
被控对象菜单显示 PID 调节器用于控制器设计的当前被控对象的名称。
使用以下菜单选项更改当前被控对象:
PID 调节器数据浏览器中显示的 LTI 模型列表。
导入 - 从 MATLAB 工作区导入新 LTI 模型。
重新线性化闭环 - 在不同快照时间线性化被控对象。请参阅在不同工作点上调节 (Simulink Control Design)。此选项仅在调节 Simulink 模型中的 PID Controller 或 PID Controller (2DOF) 模块时可用。
辨识新被控对象 - 使用系统辨识从测得或仿真的系统响应数据中获得被控对象(需要 System Identification Toolbox 软件)。请参阅相关文档:
当调节 LTI 模型的 PID 控制器时,请参阅根据响应数据以交互方式估计被控对象参数。
当调节 Simulink 模型中的 PID Controller 模块时,请参阅Interactively Estimate Plant from Measured or Simulated Response Data (Simulink Control Design)。
如果您正在为由 LTI 模型表示的被控对象调节 PID 控制器,则默认被控对象是:
被控对象 = 1(如果您从 MATLAB 工具条的 App 选项卡中打开 PID 调节器,或您使用了不带输入参量的
pidTuner命令)。您指定为
pidTuner的输入参量的被控对象。
如果您正在调节 Simulink 模型中的 PID Controller 或 PID Controller (2DOF) 模块,则默认被控对象在模型初始条件指定的工作点处线性化。请参阅PID 调节器要处理的被控对象 (Simulink Control Design)
控制器类型指定 PID 控制器中存在哪些项。例如,PI 控制器有比例项和积分项。PDF 控制器具有比例项和滤波导数项。
如果您正在为由 LTI 模型表示的被控对象调节控制器,请使用类型菜单指定控制器类型。当您更改控制器类型时,PID 调节器会自动设计新控制器。可用的控制器类型包括二自由度 PID 控制器,这种控制器在抗扰和参考跟踪之间的权衡中具有更大的灵活性。有关可用控制器类型的详细信息,请参阅PID Controller Types for Tuning。
如果您正在调节 Simulink 模型中的 PID Controller 或 PID Controller (2DOF) 模块,则类型字段会显示在模块对话框中指定的控制器类型。
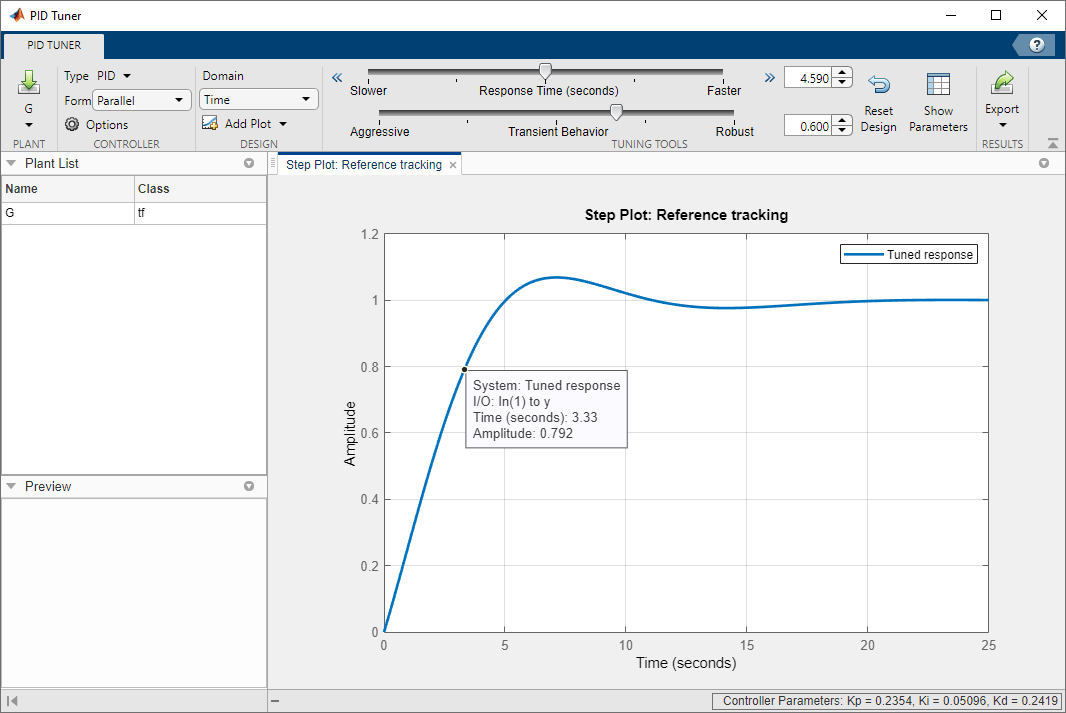
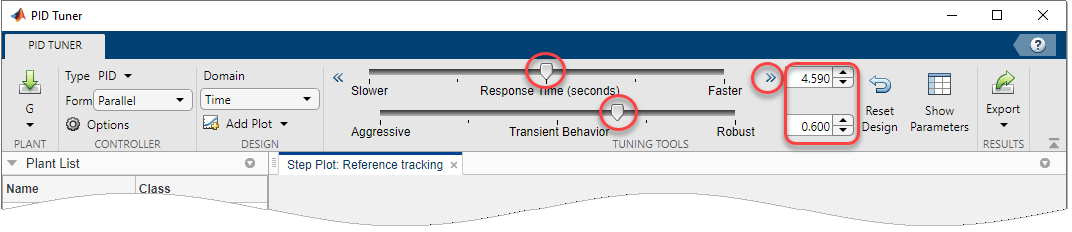
域菜单可用于切换 PID 调节器用来显示目标性能参数的域。
时间 - 滑块设置响应时间和瞬态特性。
频率 - 滑块设置带宽和相位裕度。
要细化控制器设计,您可以使用滑块或对应的数值来调整目标性能参数。
有关详细信息,请参阅:
细化设计(调节 LTI 模型的控制器)
Refine the Design (Simulink Control Design)(调节 Simulink 模型中的 PID Controller 或 PID Controller (2DOF) 模块)
创建时域和频域分析图,以帮助分析 PID 控制器的性能。有关可用响应图的详细信息,请参阅:
在 PID 调节器中分析设计(调节 LTI 模型的控制器)
Analyze Design in PID Tuner (Simulink Control Design)(调节 Simulink 模型中的 PID Controller 或 PID Controller (2DOF) 模块)
编程用途
提示
要在命令行中进行 PID 调节,请使用
pidtune。pidtune命令可以一次为多个被控对象设计控制器。有关实时编辑器中的交互式 PID 调节,请参阅调节 PID 控制器实时编辑器任务。此任务可以交互方式设计 PID 控制器,并为实时脚本自动生成 MATLAB 代码。
版本历史记录
在 R2010b 中推出