在不同工作点上调节
默认情况下,PID 调节器会线性化您的被控对象,并在 Simulink® 模型中的初始条件指定的工作点上设计一个控制器。有时,此工作点不同于您要为其设计控制器的工作点。例如,您要为处于稳态的系统设计一个控制器。然而,在初始条件下,Simulink 模型通常不处于稳态。在这种情况下,请更改 PID 调节器用于线性化被控对象和设计控制器的工作点。
要为 PID 调节器设置新工作点,请使用以下方法之一。您选择的方法取决于您对所需工作点的了解情况。
使用已知状态值在模型中手动指定工况。
在特定仿真时间重新线性化模型。
导入先前计算的工作点或线性模型。
在 PID 调节器根据更新的工作点生成新的初始控制器设计后,您可以分析控制器设计。有关详细信息,请参阅Analyze Design in PID Tuner。
在模型中手动指定工况
如果您知道产生所需稳态工况的模型状态,则可以直接在模型中指定这些状态。
关闭 PID 调节器。
将模型组件的初始条件设置为产生所需工况的值。
点击“PID 控制器”对话框中的调节以打开 PID 调节器。PID 调节器使用新的默认工作点线性化被控对象,并为新的线性被控对象模型设计新的初始控制器。
在仿真快照时间重新线性化模型
如果您的模型在有限时间内达到所需值,您可以在特定仿真时间重新线性化模型。
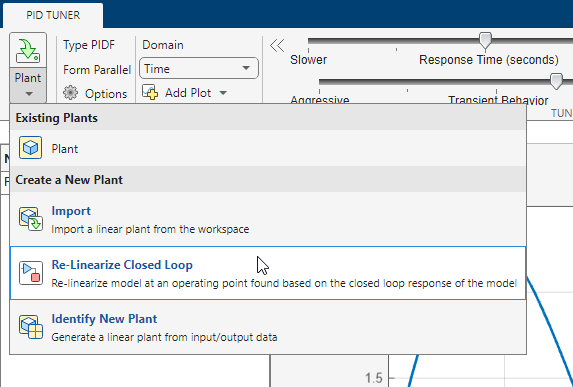
在 PID 调节器选项卡的被控对象菜单中,选择重新线性化闭环。
在闭环重新线性化选项卡上,点击
 运行仿真,以对模型进行仿真,仿真持续时间为在仿真时间文本框中指定的时间。
运行仿真,以对模型进行仿真,仿真持续时间为在仿真时间文本框中指定的时间。PID 调节器绘制误差信号随时间变化的图。您可以使用此绘图来确定模型处于稳态的某个时间。将垂直条滑动到您要线性化模型的某个快照时间处。
点击
 线性化以在选定快照时间处线性化模型。PID 调节器计算一个新的线性化被控对象,并将其保存到 PID 调节器工作区。PID 调节器自动为新被控对象设计一个控制器,并显示新闭环系统的响应图。PID 调节器返回到 PID 调节器选项卡,其中的被控对象菜单反映为电流控制器设计选择的新被控对象。
线性化以在选定快照时间处线性化模型。PID 调节器计算一个新的线性化被控对象,并将其保存到 PID 调节器工作区。PID 调节器自动为新被控对象设计一个控制器,并显示新闭环系统的响应图。PID 调节器返回到 PID 调节器选项卡,其中的被控对象菜单反映为电流控制器设计选择的新被控对象。注意
对于具有 Trigger-Based Operating Point Snapshot 模块的模型,软件会在仿真达到快照时间之前触发的事件处捕获一个工作点。
导入工作点或线性模型
如果您之前使用稳态管理器、模型线性化器或 findop 计算了工作点,则可以将工作点从 MATLAB® 工作区导入 PID 调节器。您也可以导入先前计算的线性模型。
在 PID 调节器选项卡的被控对象菜单中,选择导入。

在“获取被控对象模型”对话框中,选择导入 LTI 系统或在 MATLAB 工作区中定义的工作点上线性化。
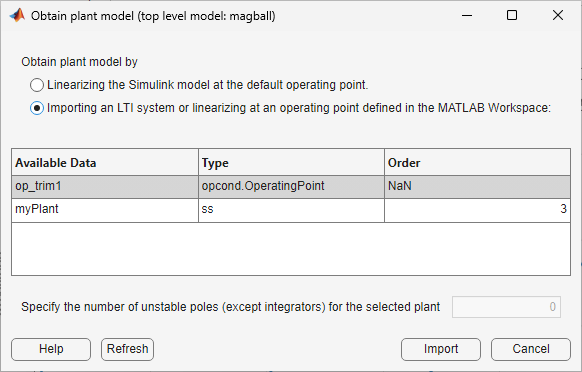
表列出了 MATLAB 工作区中可用的工作点和 LTI 模型。
在表中选择所需的工作点或 LTI 模型。
提示
要刷新 MATLAB 工作区中的工作点和 LTI 模型列表,请点击刷新。
如果您要导入具有内部延迟的
frd模型或状态空间模型,请在文本框中指定开环不稳定极点的数量(如果有)。如果值不正确,可能会导致 PID 控制器无法稳定实际被控对象。不稳定极点是指处于以下状态的极点:Re(s) > 0,对于连续时间被控对象
|z| > 1,对于离散时间被控对象
在这种情况下,被控对象中的纯积分器((s = 0) 或 (|z| > 1))不算作不稳定极点。如果您的被控对象是具有纯积分器的被控对象
frd模型,则为了获得最佳结果,请确保您的频率响应数据覆盖足够低的频率以捕获积分器斜率。点击导入。
PID 调节器在导入的工作点计算新的线性化被控对象或导入指定的 LTI 模型。该 App 自动为新被控对象设计一个控制器,并显示新闭环系统的响应图。该 App 返回到 PID 调节器选项卡,其中的被控对象菜单反映为电流控制器设计选择的新被控对象。
线性化模型初始条件
默认情况下,当您打开 PID 调节器时,模型将在模型初始条件定义的工作点进行线性化。在不同的工作点对模型进行线性化后,您可能希望返回到默认线性化。为此,请执行以下操作:
在“获取被控对象模型”对话框中,点击在默认工作点上线性化 Simulink 模型。
点击导入。PID 调节器计算一个新的线性化被控对象,自动为新被控对象设计一个控制器,并显示新闭环系统的响应图。该 App 返回到 PID 调节器选项卡,其中的被控对象菜单反映为电流控制器设计选择的新被控对象。