findop
查找来自设定(配平)或仿真的稳态工作点
语法
说明
示例
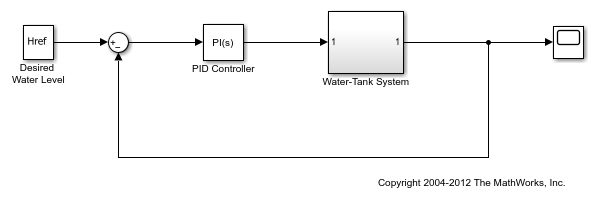
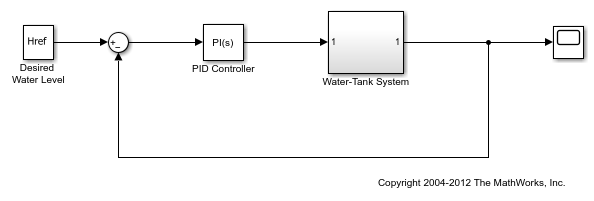
打开 Simulink 模型。
mdl = 'watertank';
open_system(mdl)
配平模型,找到水箱水位为 10 的稳态工作点。
创建默认工作点设定对象。
opspec = operspec(mdl);
为第一个模型状态配置设定。第一个状态必须处于稳态,且下界为 0。为状态值提供初始估计值 2。
opspec.States(1).SteadyState = 1; opspec.States(1).x = 2; opspec.States(1).Min = 0;
将第二个模型状态配置为某个已知状态且值为 10。
opspec.States(2).Known = 1; opspec.States(2).x = 10;
找到符合这些设定的工作点。
op = findop(mdl,opspec);
Operating point search report:
---------------------------------
opreport =
Operating point search report for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
Operating point search completed successfully using optimization.
States:
----------
Min x Max dxMin dx dxMax
______ ______ ______ ______ ______ ______
(1.) watertank/PID Controller/Integrator/Continuous/Integrator
0 1.2649 Inf 0 0 0
(2.) watertank/Water-Tank System/H
10 10 10 0 0 0
Inputs: None
----------
Outputs: None
----------
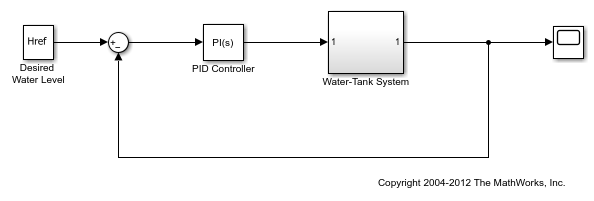
打开 Simulink 模型。
mdl = 'watertank';
open_system(mdl)
在其标称值的 10% 范围内改变参数 A 和 b,并创建一个 3×4 参数网格。
[A_grid,b_grid] = ndgrid(linspace(0.9*A,1.1*A,3),...
linspace(0.9*b,1.1*b,4));
创建一个参数结构体数组,指定每个参数的名称和网格点。
params(1).Name = 'A'; params(1).Value = A_grid; params(2).Name = 'b'; params(2).Value = b_grid;
为模型创建一个默认工作点设定。
opspec = operspec(mdl);
使用指定的工作点设定和参数网格配平模型。
opt = findopOptions('DisplayReport','off'); op = findop(mdl,opspec,params,opt);
op 是一个由对应于指定参数网格点的工作点对象组成的 3×4 数组。
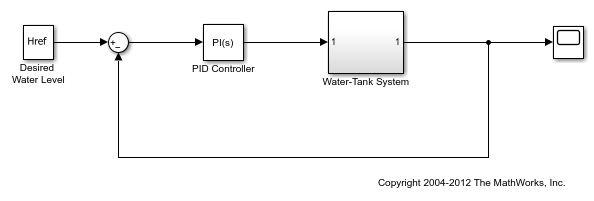
打开 Simulink 模型。
mdl = 'watertank';
open_system(mdl)
创建一个默认工作点设定对象。
opspec = operspec(mdl);
创建一个选项集,将优化器类型设置为梯度下降并隐藏搜索报告显示。
opt = findopOptions('OptimizerType','graddescent','DisplayReport','off');
使用指定的选项集配平模型。
op = findop(mdl,opspec,opt);
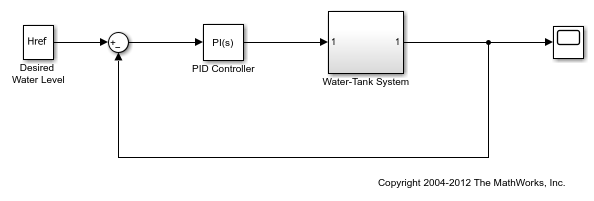
打开 Simulink 模型。
mdl = 'watertank';
open_system(mdl)
创建默认工作点设定对象。
opspec = operspec(mdl);
为第一个模型状态配置设定。
opspec.States(1).SteadyState = 1; opspec.States(1).x = 2; opspec.States(1).Min = 0;
为第二个模型状态配置设定。
opspec.States(2).Known = 1; opspec.States(2).x = 10;
找到满足这些设定的工作点,并返回工作点搜索报告。创建一个选项集以隐藏搜索报告显示。
opt = findopOptions('DisplayReport',false);
[op,opreport] = findop(mdl,opspec,opt);
opreport 描述在工作点搜索结束时优化算法与设定的匹配程度。
opreport
opreport =
Operating point search report for the Model watertank.
(Time-Varying Components Evaluated at time t=0)
Operating point search completed successfully using optimization.
States:
----------
Min x Max dxMin dx dxMax
______ ______ ______ ______ ______ ______
(1.) watertank/PID Controller/Integrator/Continuous/Integrator
0 1.2649 Inf 0 0 0
(2.) watertank/Water-Tank System/H
10 10 10 0 0 0
Inputs: None
----------
Outputs: None
----------
dx 是每个状态的时间导数。由于所有 dx 值都为零,说明工作点处于稳态。
打开 Simulink 模型。
mdl = 'magball';
open_system(mdl)
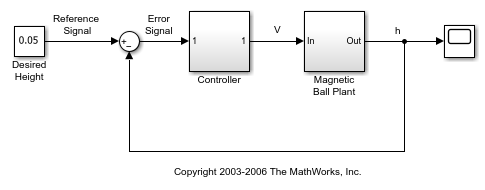
仿真模型,并提取在 10 和 20 个时间单位处的工作点。
op = findop(mdl,[10,20]);
op 是一个由工作点组成的列向量,其中的每个元素对应一个快照时间。
显示第一个工作点。
op(1)
ans =
Operating point for the Model magball.
(Time-Varying Components Evaluated at time t=10)
States:
----------
x
__________
(1.) magball/Controller/PID Controller/Filter/Cont. Filter/Filter
5.4732e-07
(2.) magball/Controller/PID Controller/Integrator/Continuous/Integrator
14.0071
(3.) magball/Magnetic Ball Plant/Current
7.0036
(4.) magball/Magnetic Ball Plant/dhdt
8.443e-08
(5.) magball/Magnetic Ball Plant/height
0.05
Inputs: None
----------
打开 Simulink 模型。
mdl = 'watertank';
open_system(mdl)
指定参数值。参数网格为 5×4 数组。
[A_grid,b_grid] = ndgrid(linspace(0.9*A,1.1*A,5),... linspace(0.9*b,1.1*b,4)); params(1).Name = 'A'; params(1).Value = A_grid; params(2).Name = 'b'; params(2).Value = b_grid;
仿真模型,并提取在 0、5 和 10 个时间单位处的工作点。
op = findop(mdl,[0 5 10],params);
findop 针对每个参数值组合仿真模型,并在指定的仿真时间处提取工作点。
op 是一个由工作点对象组成的 3×5×4 数组。
size(op)
ans =
3 5 4
输入参数
输出参量
详细信息
提示
您可以使用
initopspec在仿真快照处或之前计算的工作点处初始化工作点搜索。要从工作点对象中提取状态值和输入值,请分别使用
getstatestruct和getinputstruct。
算法
默认情况下,findop 使用优化器 graddescent-elim。要使用不同的优化器,请使用 findopOptions 更改 options 中 OptimizerType 的值。
findop 自动设置这些 Simulink 模型属性以进行优化:
BufferReuse = "off"BlockReductionOpt = 'off"SaveFormat = "StructureWithTime"
优化完成后,Simulink 会还原原始模型属性。
替代功能
App
作为 findop 命令的替代方法,您可以通过以下方式之一找到工作点。
使用稳态管理器计算工作点。有关示例,请参阅Compute Operating Points from Specifications Using Steady State Manager。
如果您要计算线性化的某个工作点,您可以找到该工作点并使用模型线性化器对模型进行线性化。有关示例,请参阅Compute Operating Points from Specifications Using Model Linearizer。