用 PID 调节器设计 PID 控制器
在 Control System Toolbox™ 中,PID 调节器可用于对由 LTI 模型表示的被控对象的 PID 控制器执行自动、交互式调节。
有关使用 PID 调节器调节 Simulink® 模型中 PID Controller 模块的信息,请参阅Simulink 中基于模型的 PID 调节简介 (Simulink Control Design)。
PID 调节器概述
使用 PID 调节器在单环负反馈控制配置中以交互方式设计 SISO PID 控制器。
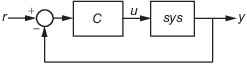
PID 调节器自动为您的被控对象设计控制器。您可以指定控制器的类型(P、I、PI、PD、PDF、PID、PIDF)和形式(并行或标准)。
您也可以使用 PID 调节器为下图的反馈配置设计二自由度 PID 控制器:
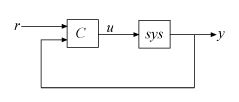
PID 调节器可以设计二自由度 PID 控制器,其中设定点权重可以是自由可调参数。PID 调节器还可以设计另一种控制器,其中设定点权重在常见的控制配置(例如 I-PD 和 PI-D)中是固定的。
您可以使用各种响应图来分析设计,并以交互方式调整设计来满足您的性能要求。
要启动 PID 调节器,请使用 pidTuner 命令:
pidTuner(sys,type)
其中 sys 是您要控制的被控对象的线性模型,type 表示要设计的控制器类型。
或者,输入
pidTuner(sys,Cbase)
其中 Cbase 是基线控制器,允许您将设计的控制器的性能与 Cbase 的性能进行比较。
有关 sys 和 Cbase 的详细信息,请参阅 pidTuner 参考页。
注意
您也可以从 MATLAB® 桌面的 App 选项卡中打开 PID 调节器。在您执行此操作时,请使用 PID 调节器中的被控对象菜单来指定您的被控对象模型。
PID 控制器类型
要选择控制器类型,请使用以下方法之一:
在打开 App 时指定类型 - 在打开 PID 调节器时,为
pidTuner命令提供type参量。例如,pidTuner(G,'PIDF2')会打开一个 PID 调节器:其初始设计是导数项带有滤波器的二自由度 PID 控制器。使用现有控制器对象指定类型 - 在打开 PID 调节器时,为
pidTuner命令提供基线控制器Cbase参量。PID 调节器会设计与Cbase类型相同的控制器。例如,假设C0是一个pid控制器对象,它只具有比例和导数作用(PD 控制器)。那么,pidTuner(G,C0)就会打开初始设计为 PD 控制器的 PID 调节器。在 App 中指定控制器类型 - 在 PID 调节器中,使用类型菜单更改控制器类型。
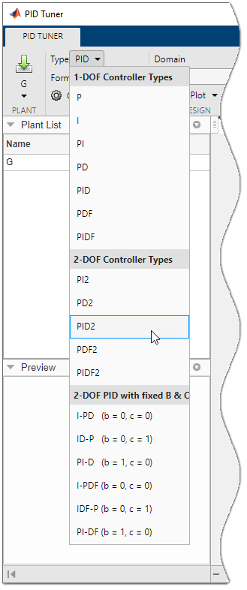
下列各表总结了可用的 PID 控制器类型。有关这些控制器类型的详细信息,请参阅PID Controller Types for Tuning。
单自由度控制器
pidTuner 的 type 输入 | 类型菜单中的项 | 控制器动作 |
|---|---|---|
'P' | P | 纯比例 |
'I' | I | 纯积分 |
'PI' | PI | 比例和积分 |
'PD' | PD | 比例和导数 |
'PDF' | 比例和导数,其中导数项带有一阶滤波器 | |
'PID' | PID | 比例、积分和导数 |
'PIDF' | PIDF | 比例、积分和导数,其中导数项带有一阶滤波器 |
二自由度控制器
PID 调节器可以自动设计具有自由设定点权重的二自由度 PID 控制器类型。下表总结了 PID 调节器中的二自由度控制器类型。有关二自由度 PID 控制器的详细信息,请参阅二自由度 PID 控制器。
pidTuner 的 type 输入 | 类型菜单中的项 | 控制器动作 |
|---|---|---|
'PI2' | PI2 | 二自由度比例和积分 |
'PD2' | PD2 | 二自由度比例和导数 |
'PDF2' | PDF2 | 二自由度比例和导数,其中导数项带有一阶滤波器 |
'PID2' | PID2 | 二自由度比例、积分和导数 |
'PIDF2' | PIDF2 | 二自由度比例、积分和导数,其中导数项带有一阶滤波器 |
具有固定设定点权重的二自由度控制器
使用 PID 调节器设计下表中总结的固定设定点权重控制器类型。有关这些控制器类型的详细信息,请参阅PID Controller Types for Tuning。
pidTuner 的 type 输入 | 类型菜单中的项 | 控制器动作 |
|---|---|---|
'I-PD' | I-PD | 二自由度 PID,其中 b = 0、c = 0 |
'I-PDF' | I-PDF | 二自由度 PIDF,其中 b = 0、c = 0 |
'ID-P' | ID-P | 二自由度 PID,其中 b = 0、c = 1 |
'IDF-P' | IDF-P | 二自由度 PIDF,其中 b = 0、c = 1 |
'PI-D' | PI-D | 二自由度 PID,其中 b = 1、c = 0 |
'PI-DF' | PI-DF | 二自由度 PIDF,其中 b = 1、c = 0 |
离散时间控制器类型
如果 sys 是具有采样时间 Ts 的离散时间模型,则 PID 调节器使用 ForwardEuler 离散积分器公式设计离散时间 pid 控制器。要设计具有不同离散积分器公式的控制器,请使用以下方法之一:
为启动命令
pidTuner提供离散时间基线控制器Cbase。PID 调节器据此设计的控制器具有与Cbase相同的离散积分器公式。在启动 PID 调节器后,点击选项以打开控制器选项对话框。从积分公式和导数公式菜单中选择离散积分器公式。
PID 控制器形式
当您为 pidTuner 使用 type 输入时,PID 调节器以并联型设计控制器。要设计标准形式的控制器,请使用以下方法之一:
为启动命令
pidTuner提供标准形式的基线控制器Cbase。PID 调节器会设计与Cbase相同形式的控制器。在启动 PID 调节器后,使用形式菜单更改控制器形式。