在 PID 调节器中分析设计
在 Control System Toolbox™ 中,PID 调节器提供了系统响应图和其他一些工具,可为表示为 LTI 模型的被控对象调节 PID 控制器。
有关 Simulink® 模型中使用 PID 调节器进行分析的信息,请参阅 Analyze Design in PID Tuner (Simulink Control Design)。
绘制系统响应
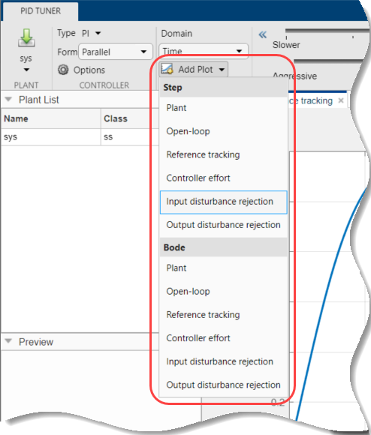
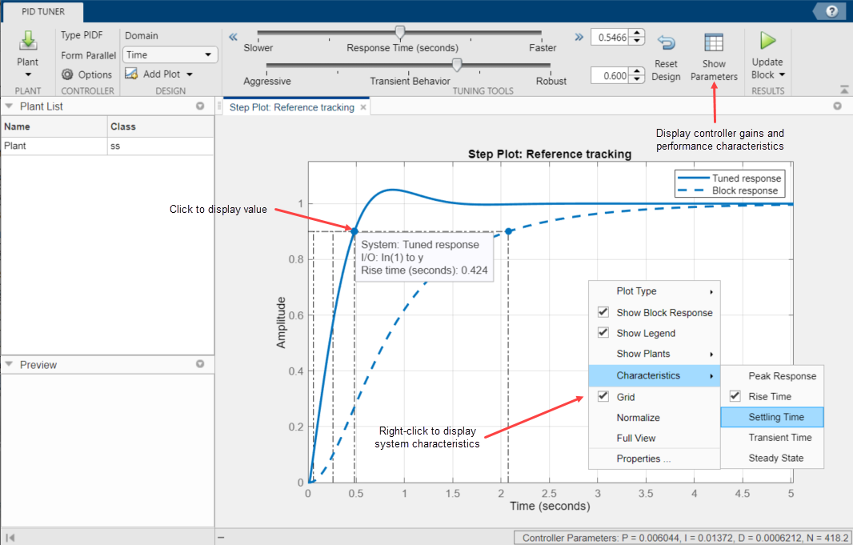
为了确定补偿器设计是否满足您的要求,您可以使用响应图来分析系统响应。在 PID 调节器选项卡上,从添加绘图菜单中选择一个响应图。添加绘图菜单还允许您从几个阶跃图(时域响应)或波特图(频域响应)中进行选择。
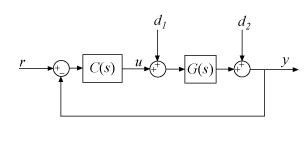
对于 PI、PIDF 和 PDF 等单自由度 PID 控制器类型,软件根据以下单环控制架构计算系统响应,其中 G 是您指定的被控对象,C 是 PID 控制器:
对于 PI2、PIDF2 和 I-PD 等二自由度 PID 控制器类型,软件根据以下架构计算响应:
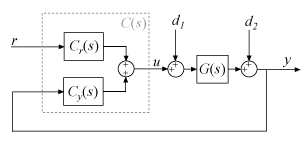
系统响应基于二自由度 PID 控制器 C 的分解,即分解为设定点分量 Cr 和反馈分量 Cy,如 二自由度 PID 控制器 中所述。
下表总结了可用于分析绘图的几种响应。(对于频率响应数据被控对象,如 frd 模型,时域响应图不可用。)
| 响应 | 绘制的系统(单自由度) | 绘制的系统(二自由度) | 描述 |
|---|---|---|---|
| 被控对象 | G | G | 被控对象响应。用于检查被控对象的动态特性。 |
| 开环 | GC | –GCy | 开环控制器被控对象系统的响应。用于频域设计。 当您的设计设定包括开环增益裕度和相位裕度等稳健性条件时适用。 |
| 参考跟踪 | (从 r 到 y) | (从 r 到 y) | 对设定点中阶跃变化的闭环系统响应。当您的设计设定中包括设定点跟踪时适用。 |
| 控制器代价 | (从 r 到 u) | (从 r 到 u) | 闭环控制器输出对设定点阶跃变化的响应。当设计受限于实际约束(如控制器饱和)时适用。 |
| 输入抗扰 | (从 d1 到 y) | (从 d1 到 y) | 闭环系统对负载扰动(被控对象输入处的阶跃扰动)的响应。当设计设定中包括输入抗扰时适用。 |
| 输出抗扰 | (从 d2 到 y) | (从 d2 到 y) | 闭环系统对被控对象输出处阶跃扰动的响应。当您要分析对建模错误的敏感度时适用。 |
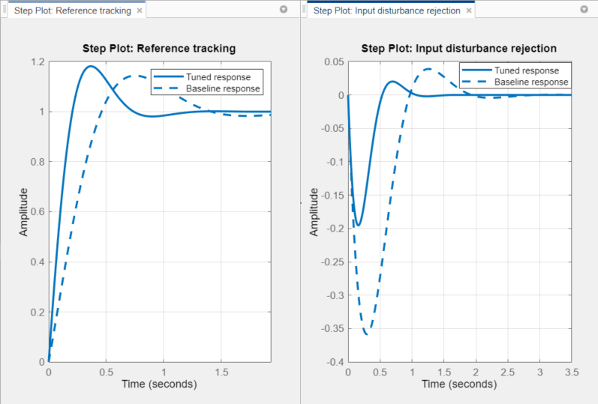
将调节后响应与基线响应进行比较
如果您定义了基线控制器,则默认情况下,PID 调节器会显示使用当前 PID 调节器设计的响应和使用基线控制器的响应。
定义基线控制器有两种方法。
使用语法
pidTuner(sys,C0)在打开 PID 调节器时加载基线控制器。通过点击导出箭头
 并选择另存为基线,可立即将当前 PID 调节器设计作为基线控制器。
并选择另存为基线,可立即将当前 PID 调节器设计作为基线控制器。
执行此操作时,当前的调节后响应将成为基线响应。对当前设计的进一步调整会创建新的调节后响应线。
要隐藏基线响应,请点击
 选项,并清除显示基线控制器数据。
选项,并清除显示基线控制器数据。
查看系统特性值
您可以通过以下任一方法查看系统特性的值,如峰值响应和增益裕度:
直接在响应图上 - 使用右键点击菜单添加特性,显示为蓝色标记。然后,左键点击标记以显示对应的数据面板。
在性能和稳健性表中 - 要显示此表,请点击
 显示参数。
显示参数。
细化设计
如果初始控制器设计的响应不符合您的要求,您可以通过交互方式调整设计。PID 调节器为您提供了两个域选项来细化控制器设计:
时间(默认值)- 使用响应时间滑块来加快或减慢控制系统的闭环响应速度。使用瞬态特性滑块,使控制器更积极地抑制扰动或更稳健地应对被控对象的不确定性。
频率 - 使用带宽滑块来加快或减慢控制系统的闭环响应速度(响应时间为 2/wc,其中 wc 是带宽)。使用相位裕度滑块,使控制器更积极地抑制扰动或更稳健地应对被控对象的不确定性。
这两种模式都在参考跟踪和抗扰性能之间存在权衡关系。有关如何使用滑块调整此权衡关系的示例,请参见 调节 PID 控制器以侧重参考跟踪或抗扰(PID 调节器)。
提示
要在移动滑块后还原到初始控制器设计,请点击  重置设计。
重置设计。