用于快速参考跟踪的 PID 控制器设计
此示例说明如何使用 PID 调节器为被控对象设计控制器:
设计需求是让闭环系统跟踪参考输入,且上升时间小于 1.5 秒,稳定时间小于 6 秒。
在此示例中,需要将被控对象表示为一个 LTI 模型。有关使用 PID 调节器调节 Simulink® 模型中 PID Controller 模块的信息,请参阅Tune PID Controller to Favor Reference Tracking or Disturbance Rejection (Simulink Control Design)。
创建被控对象模型并打开 PID 调节器,设计一个初步的 PI 控制器。
sys = zpk([],[-1 -1 -1],1); pidTuner(sys,'pi')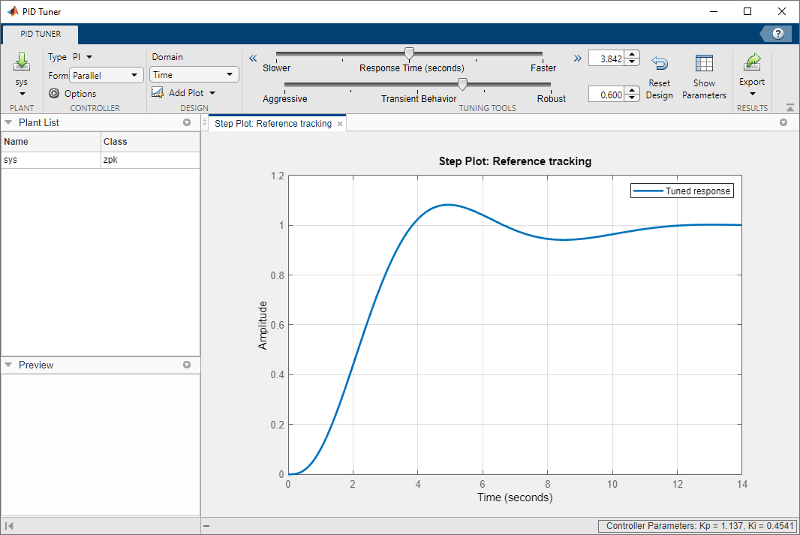
当您打开 PID 调节器时,它会自动设计您指定类型的控制器(此处为 PI)。控制器旨在实现性能(响应时间)和稳健性(稳定裕度)之间的平衡。PID 调节器显示具有设计的控制器的系统的闭环阶跃响应。
提示
您也可以从 MATLAB® 桌面的 App 选项卡中打开 PID 调节器。在您执行此操作时,请使用 PID 调节器中的被控对象菜单来指定您的被控对象模型。
检查参考跟踪上升时间和稳定时间。
右键点击图,选择特性 > 上升时间以将上升时间标记为图上的蓝点。选择特性 > 稳定时间以标记稳定时间。要查看具有数值的工具提示,请点击每个蓝点。

初始 PI 控制器设计提供 2.35 秒的上升时间和 10.7 秒的稳定时间。两个结果都比设计需求慢。
注意
要在图上显示表中(而不是工具提示中)的性能度量,请点击显示参数。此操作将打开一个显示画面,其中包含性能和稳健性度量以及调节后的控制器增益。
向右滑动响应时间滑块以尝试改进环路性能。响应图会根据新设计自动更新。

如果将响应时间滑块移动足够远以满足小于 1.5 秒的上升时间要求,则会导致振荡加剧。此外,参数显示画面表明新响应的稳定时间过长。

为了达到更快的响应速度,算法必须牺牲稳定性。
更改控制器类型以改进响应。
向控制器增加导数作用可以让 PID 调节器更自由地以期望的响应速度实现足够的相位裕度。
在类型菜单中,选择
PIDF。PID 调节器会设计一个新的 PIDF 控制器。(有关可用的控制器类型的详细信息,请参阅 PID 控制器类型。)
现在,上升时间和稳定时间便满足设计需求了。您可以使用响应时间滑块进一步调整响应。要还原到默认的自动调节结果,请点击重置设计。
注意
要调整闭环带宽而不是响应时间,请从域下拉列表中选择频率。带宽与响应时间成反比。
分析其他系统响应(如果适用)。
要分析其他系统响应,请点击添加绘图。选择要分析的系统响应。
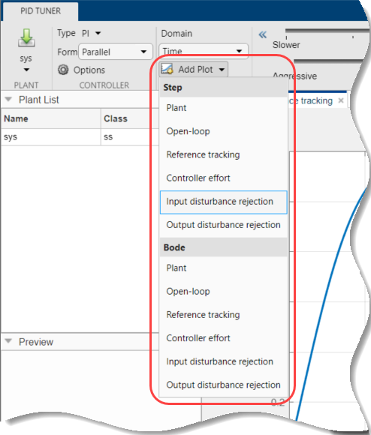
例如,要观察被控对象输入对扰动的闭环阶跃响应,请在添加绘图菜单的阶跃部分中,选择
Input disturbance rejection。抗扰响应会出现在一个新的图窗中。
有关可用的响应图的详细信息,请参阅在 PID 调节器中分析设计。
提示
使用视图选项卡中的选项来更改 PID 调节器显示多个绘图的方式。
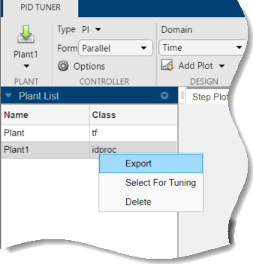
将您的控制器设计导出到 MATLAB 工作区。
要将您的最终控制器设计导出到 MATLAB 工作区,请点击
 导出。PID 调节器将控制器导出为
导出。PID 调节器将控制器导出为 您也可以在数据浏览器中使用右键点击菜单来导出模型。为此,请点击数据浏览器选项卡。

然后,右键点击该模型并选择导出。