Configure PID Controller Options in PID Tuner
In PID Tuner, you can configure options for:
Displaying the current block response in analysis plots and the parameter table.
The controller design focus.
To configure these options, on the PID Tuner tab, click Options. Then, in the Controller Options dialog box, specify the controller settings.
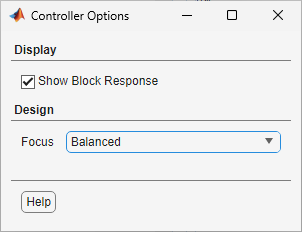
Display Block Response
To display the system response using the PID parameters currently defined in the PID Controller block in the Simulink® model, select the Show Block Response parameter. When you select this option, data obtained using the current PID parameters is included in analysis plots and in the parameters table.
To update the PID Controller block in the Simulink model with tuned parameter values, on the PID Tuner tab,
click ![]() .
.
Design Focus
Closed-loop performance objective to favor in the design. For a given target phase margin, PID Tuner chooses a controller design that balances the two measures of performance, reference tracking and disturbance rejection. When you change the Focus option, the tuning algorithm attempts to adjust the PID gains to favor either reference tracking or disturbance rejection while achieving the same target phase margin.
The Focus option can take the following values:
Balanced(default) — For a given robustness, tune the controller to balance reference tracking and disturbance rejection.
Reference tracking— Tune the controller to favor reference tracking, if possible.
Input disturbance rejection— Tune the controller to favor disturbance rejection, if possible.
The more tunable parameters there are in the system, the more likely it is that the PID algorithm can achieve the desired design focus without sacrificing robustness. For example, setting the design focus is more likely to be effective for PID controllers than for P or PI controllers.
In all cases, how much you can fine-tune the performance of the system depends strongly on the properties of your plant. For some plants, changing the Focus option might have little or no effect.
For an example illustrating the effect of this option, see Tune PID Controller to Favor Reference Tracking or Disturbance Rejection.