Tune 2-DOF PID Controller (PID Tuner)
This example shows how to design a two-degree-of-freedom (2-DOF) PID controller using PID Tuner. The example also compares the 2-DOF controller performance to the performance achieved with a 1-DOF PID controller.
In this example, you represent the plant as an LTI model. For information about using PID Tuner to tune a PID Controller (2DOF) block in a Simulink® model, see Design Two-Degree-of-Freedom PID Controllers (Simulink Control Design).
2-DOF PID controllers include setpoint weighting on the proportional and derivative terms. Compared to a 1-DOF PID controller, a 2-DOF PID controller can achieve better disturbance rejection without significant increase of overshoot in setpoint tracking. A typical control architecture using a 2-DOF PID controller is shown in the following diagram.

For this example, first design a 1-DOF controller for the plant given by:
G = tf(1,[1 0.5 0.1]); pidTuner(G,'PID')
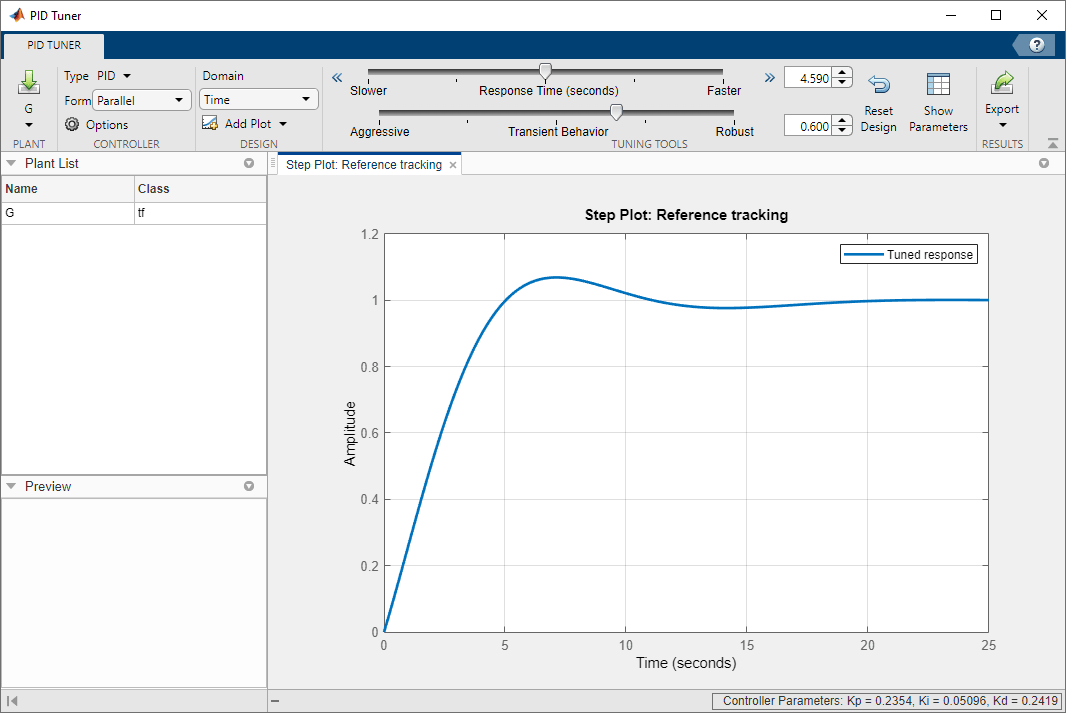
Suppose for this example that your application requires a faster response than the PID Tuner initial design. In the text box next to the Response Time slider, enter 2.
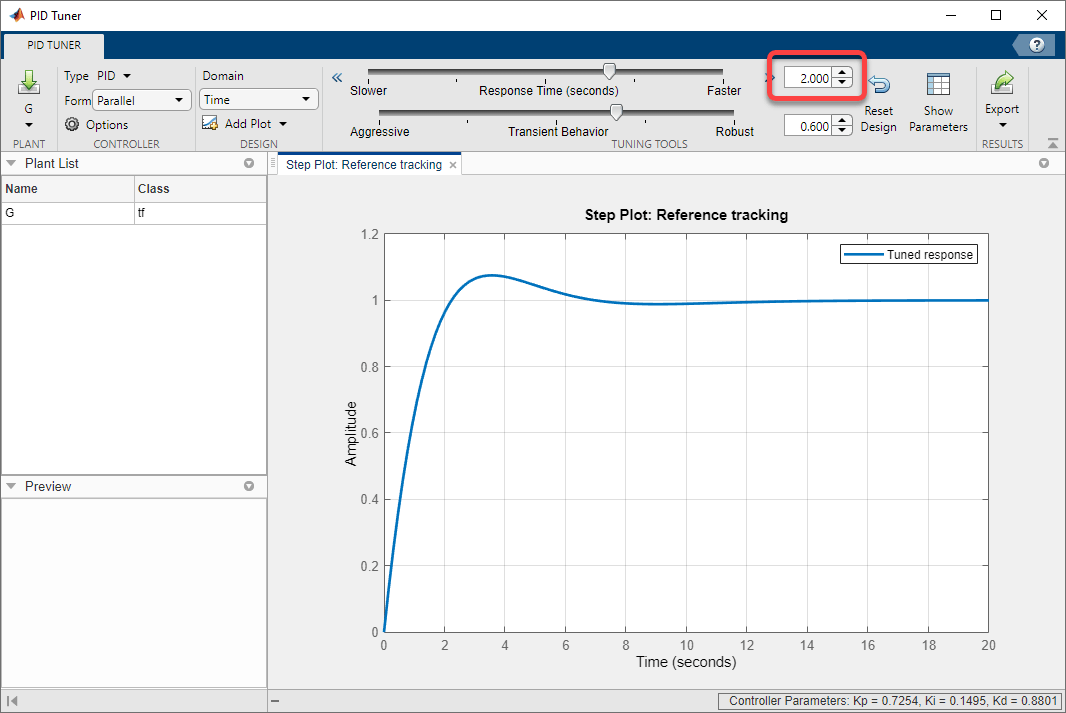
The resulting response is fast, but has a considerable amount of overshoot.
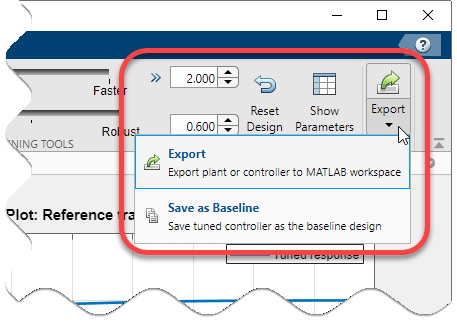
Design a 2-DOF controller to improve the overshoot. First, set the 1-DOF
controller as the baseline controller for comparison. Click the
Export arrow ![]() and select
and select Save as
Baseline.
Design the 2-DOF controller. In the Type menu, select
PID2.
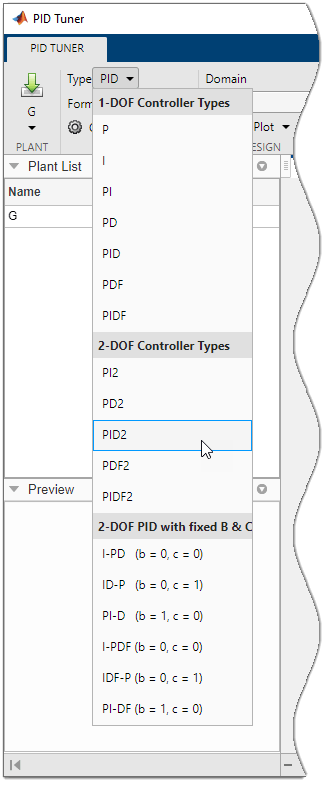
PID Tuner generates a 2-DOF controller with the same target
response time. The controller parameters displayed at the bottom right show that
PID Tuner tunes all controller coefficients, including the
setpoint weights b and c, to balance
performance and robustness. Compare the 2-DOF controller performance (solid
line) with the performance of the 1-DOF controller that you stored as the
baseline (dotted line).
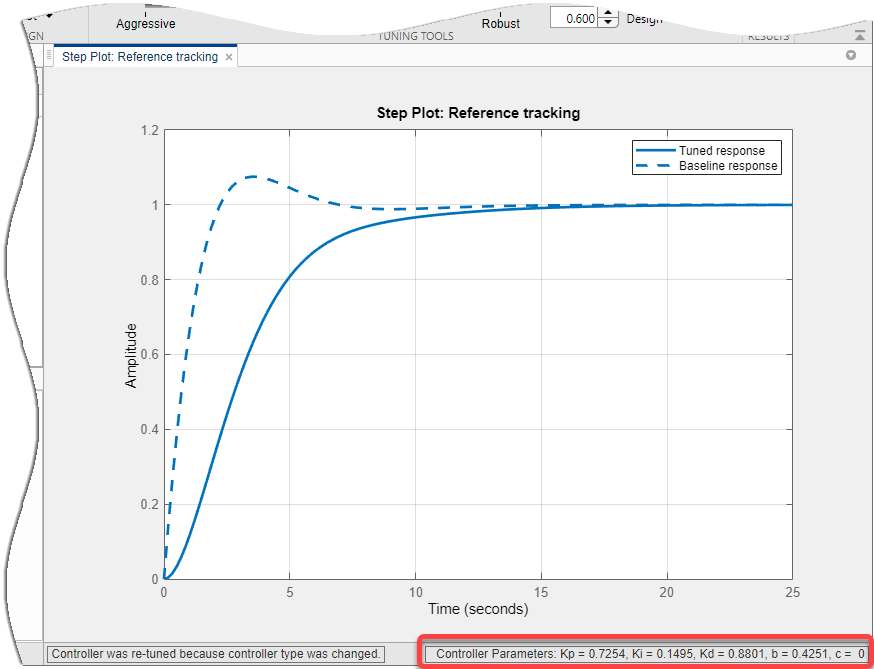
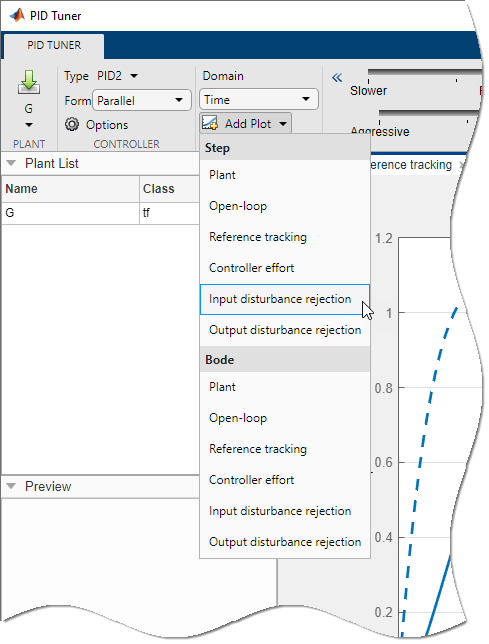
Adding the second degree of freedom eliminates the overshoot in the reference tracking response. Next, add a step response plot to compare the disturbance rejection performance of the two controllers. Select Add Plot > Input Disturbance Rejection.
You can move the plots in the PID Tuner such that the disturbance-rejection plot side by side with the reference-tracking plot.
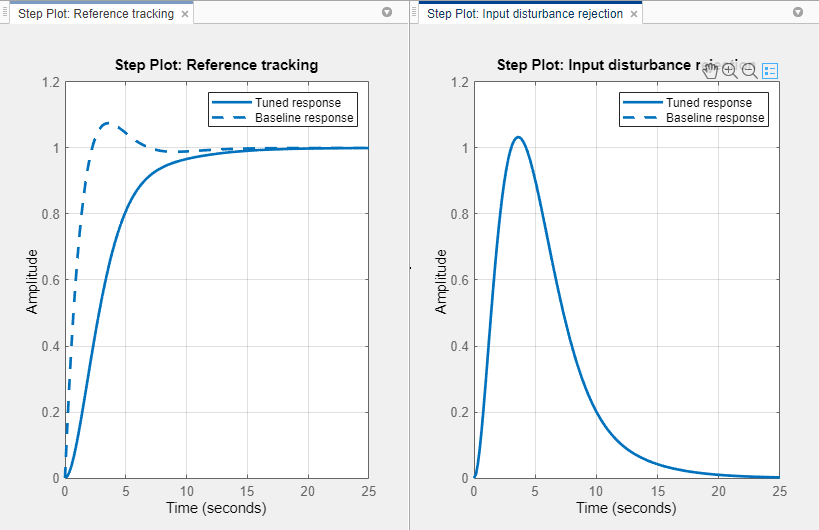
The disturbance-rejection performance is identical with both controllers. Thus, using a 2-DOF controller eliminates reference-tracking overshoot without any cost to disturbance rejection.
You can improve disturbance rejection too by changing the PID Tuner
design focus. First, click the Export arrow
![]() and select
and select Save as
Baseline again to set the 2-DOF controller as the baseline for
comparison.
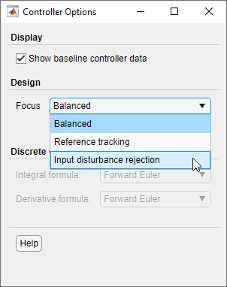
Change the PID Tuner design focus to favor reference tracking
without changing the response time or the transient-behavior coefficient. To do
so, click ![]() Options, and in the Focus menu, select
Options, and in the Focus menu, select
Input disturbance rejection.
PID Tuner automatically retunes the controller coefficients with a focus on disturbance-rejection performance.
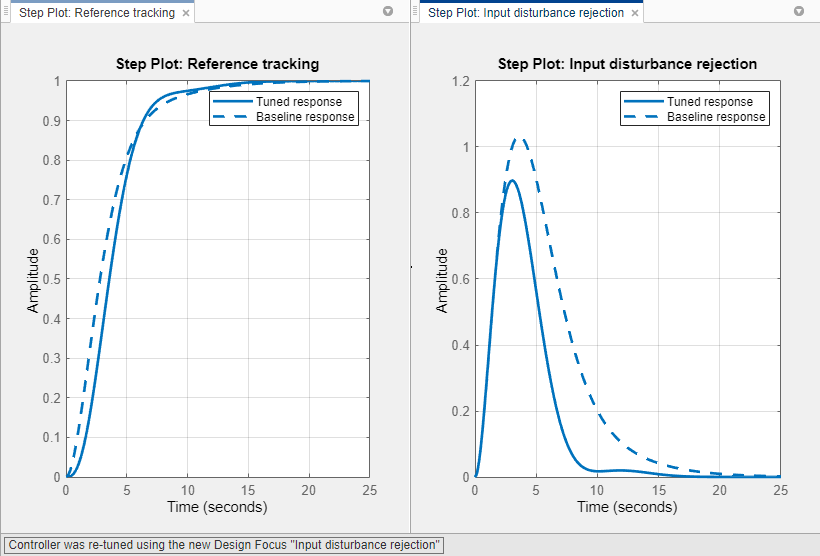
With the default balanced design focus, PID Tuner selects a
b value between 0 and 1. For this plant, when you change
design focus to favor disturbance rejection, PID Tuner sets
b = 0 and c = 0. Thus, PID
Tuner automatically generates an I-PD controller to optimize for
disturbance rejection. (Explicitly specifying an I-PD controller without setting
the design focus yields a similar controller.)
The response plots show that with the change in design focus, the disturbance rejection is further improved compared to the balanced 2-DOF controller. This improvement comes with some sacrifice of reference-tracking performance, which is slightly slower. However, the reference-tracking response still has no overshoot.
Thus, using 2-DOF control can improve disturbance rejection without sacrificing as much reference tracking performance as 1-DOF control. These effects on system performance depend strongly on the properties of your plant and the speed of your controller. For some plants and some control bandwidths, using 2-DOF control or changing the design focus has less or no impact on the tuned result.