pidtuneOptions
为 pidtune 函数定义选项
说明
使用 pidtuneOptions 对象指定使用 pidtune 函数调节 PID 控制器的属性。
创建对象
描述
opt = pidtuneOptionspidtuneOptions 对象。
opt = pidtuneOptions(PropertyName=Value)opt = pidtuneOptions(PhaseMargin=55) 创建相位裕度为 55 度的选项对象。
属性
目标相位裕度(以度为单位),指定为正标量。pidtune 尝试设计控制器,使相位裕度至少为 PhaseMargin 指定的值。所选穿越频率可能会限制可实现的相位裕度。通常,相位裕度越高,稳定性和超调量越好,但带宽和响应速度会受限。
设计中更侧重的闭环性能目标,指定为以下项之一:
'balanced'(默认)- 在给定稳健性的情况下,调节控制器以平衡参考跟踪和抗扰。'reference-tracking'- 调节控制器以尽可能更侧重参考跟踪。'disturbance-rejection'- 调节控制器以尽可能更侧重抗扰。
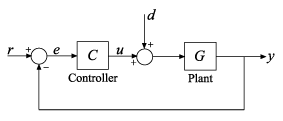
对于给定的目标相位裕度,pidtune 会选择一种平衡参考跟踪和抗扰这两种性能测度的控制器设计。当您更改 DesignFocus 选项时,调节算法会尝试调整 PID 增益以更侧重参考跟踪或抗扰,同时实现相同的目标相位裕度。在 pidtune 假设的控制架构(如下图所示)中,参考跟踪是 y 处对 r 处信号的响应,抗扰是 y 处对 d 处信号的抑制。
系统中的可调参数越多,PID 算法就越可能在不牺牲稳健性的情况下实现所需的设计侧重点。例如,相对于 P 或 PI 控制器,设置设计侧重点对于 PID 控制器可能更有效。在所有情况下,系统性能的微调程度很大程度上取决于被控对象的属性。
有关说明此选项效果的示例,请参阅调节 PID 控制器以侧重参考跟踪或抗扰(命令行)。
被控对象中的不稳定极点数,指定为非负整数。
当被控对象是 frd 模型或具有内部延迟的状态空间模型时,必须指定开环不稳定极点的数量(如果有)。如果值不正确,可能会导致 PID 控制器无法稳定实际被控对象。(pidtune 对其他模型类型忽略此选项。)
不稳定极点是指处于以下状态的极点:
Re(s) > 0,对于连续时间被控对象
|z| > 1,对于离散时间被控对象
对于 NumUnstablePoles,被控对象中的纯积分器 (s = 0) 或 (|z| > 1) 不算作不稳定极点。如果您的被控对象是具有纯积分器的被控对象 frd 模型,则为了获得最佳结果,请确保您的频率响应数据覆盖足够低的频率以捕获积分器斜率。
对象函数
pidtune | 线性被控对象模型的 PID 调节算法 |
示例
提示
版本历史记录
在 R2010b 中推出