frd
频率响应数据模型
说明
使用 frd 创建实数值或复数值频率响应数据模型,或将动态系统模型转换为频率响应数据模型形式。
频率响应数据模型存储复频率响应数据及对应的频率点。例如,频率响应数据模型 H(jwi) 存储每个输入频率 wi 下的频率响应,其中 i = 1,…,n。frd 模型对象可以表示连续时间或离散时间的 SISO 或 MIMO 频率响应数据模型。有关详细信息,请参阅Frequency Response Data (FRD) Models。
您还可以使用 frd 来创建广义频率响应数据 (genfrd) 模型。
创建对象
您可以通过以下方式之一获得 frd 模型。
使用
frd命令根据频率响应数据创建模型。例如,您可以使用在特定频率下获取的频率响应数据创建frd模型。有关示例,请参阅SISO 频率响应数据模型。
通过计算模型在指定频率下的频率响应,将线性模型(如
ss模型)转换为frd模型。有关示例,请参阅将状态空间模型转换为频率响应数据模型。
使用离线频率响应估计工作流对模型进行估计。这些工作流需要 Simulink®Control Design™ 软件。
有关详细信息,请参阅在命令行中估计频率响应 (Simulink Control Design)和使用模型线性化器估计频率响应 (Simulink Control Design)。
语法
描述
sys = frd(___,Name,Value)
输入参量
属性
对象函数
以下列表包含可用于 frd 模型的部分代表性函数。通常,许多适用于动态系统模型的函数也适用于 frd 对象。frd 模型不适用于任何时域分析函数。
示例
根据频率响应数据创建一个 frd 对象。
对于此示例,请加载为水箱模型收集的频率响应数据。
load wtankData.mat这些数据包含在 rad/s 至 rad/s 频率范围内收集到的频率响应数据。
创建模型。
sys = frd(response,frequency)
sys =
Frequency(rad/s) Response
---------------- --------
0.0010 1.562e+01 - 1.9904i
0.0018 1.560e+01 - 2.0947i
0.0034 1.513e+01 - 3.3670i
0.0062 1.373e+01 - 5.4306i
0.0113 1.047e+01 - 7.5227i
0.0207 5.829e+00 - 7.6529i
0.0379 2.340e+00 - 5.6271i
0.0695 7.765e-01 - 3.4188i
0.1274 2.394e-01 - 1.9295i
0.2336 7.216e-02 - 1.0648i
0.4281 2.157e-02 - 0.5834i
0.7848 6.433e-03 - 0.3188i
1.4384 1.916e-03 - 0.1740i
2.6367 5.705e-04 - 0.0950i
4.8329 1.698e-04 - 0.0518i
8.8587 5.055e-05 - 0.0283i
16.2378 1.505e-05 - 0.0154i
29.7635 4.478e-06 - 0.0084i
54.5559 1.333e-06 - 0.0046i
100.0000 3.967e-07 - 0.0025i
Continuous-time frequency response.
Model Properties
绘制 sys 的图。
bode(sys)

对于此示例,考虑使用随机生成的响应数据和频率。
生成一个 3×2×7 的复数数组和一个包含 7 个频率点(频率在 0.01 至 100 rad/s 之间)的频率向量。将采样时间 Ts 设置为 5 秒。
rng(0) r = randn(3,2,7)+1i*randn(3,2,7); w = logspace(-2,2,7); Ts = 5;
创建模型。
sys = frd(r,w,Ts)
sys =
From input 1 to:
Frequency(rad/s) output 1 output 2 output 3
---------------- -------- -------- --------
0.0100 0.5377 + 0.3192i 1.8339 + 0.3129i -2.2588 - 0.8649i
0.0464 -0.4336 + 1.0933i 0.3426 + 1.1093i 3.5784 - 0.8637i
0.2154 0.7254 - 0.0068i -0.0631 + 1.5326i 0.7147 - 0.7697i
1.0000 1.4090 - 1.0891i 1.4172 + 0.0326i 0.6715 + 0.5525i
4.6416 0.4889 - 1.4916i 1.0347 - 0.7423i 0.7269 - 1.0616i
21.5443 0.8884 - 0.1924i -1.1471 + 0.8886i -1.0689 - 0.7648i
100.0000 0.3252 - 0.1774i -0.7549 - 0.1961i 1.3703 + 1.4193i
From input 2 to:
Frequency(rad/s) output 1 output 2 output 3
---------------- -------- -------- --------
0.0100 0.8622 - 0.0301i 0.3188 - 0.1649i -1.3077 + 0.6277i
0.0464 2.7694 + 0.0774i -1.3499 - 1.2141i 3.0349 - 1.1135i
0.2154 -0.2050 + 0.3714i -0.1241 - 0.2256i 1.4897 + 1.1174i
1.0000 -1.2075 + 1.1006i 0.7172 + 1.5442i 1.6302 + 0.0859i
4.6416 -0.3034 + 2.3505i 0.2939 - 0.6156i -0.7873 + 0.7481i
21.5443 -0.8095 - 1.4023i -2.9443 - 1.4224i 1.4384 + 0.4882i
100.0000 -1.7115 + 0.2916i -0.1022 + 0.1978i -0.2414 + 1.5877i
Sample time: 5 seconds
Discrete-time frequency response.
Model Properties
指定的数据会生成一个双输入、三输出的 frd 模型。
对于此示例,请创建一个从传递函数模型继承属性的频率响应数据模型。
创建一个传递函数 sys1,将 TimeUnit 属性设置为 'minutes',并且将 InputDelay 属性设置为 3。
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputDelay',3)
sys1 =
2 s
exp(-3*s) * ---------
s^2 + 8 s
Continuous-time transfer function.
Model Properties
propValues1 = {sys1.TimeUnit,sys1.InputDelay}propValues1=1×2 cell array
{'minutes'} {[3]}
创建一个从 sys1 继承属性的 frd 模型。
rng(0) response = randn(1,1,7)+1i*randn(1,1,7); w = logspace(-2,2,7); sys2 = frd(response,w,sys1)
sys2 =
Frequency(rad/minute) Response
--------------------- --------
0.0100 0.5377 + 0.3426i
0.0464 1.8339 + 3.5784i
0.2154 -2.2588 + 2.7694i
1.0000 0.8622 - 1.3499i
4.6416 0.3188 + 3.0349i
21.5443 -1.3077 + 0.7254i
100.0000 -0.4336 - 0.0631i
Input delays (minutes): 3
Continuous-time frequency response.
Model Properties
propValues2 = {sys2.TimeUnit,sys2.InputDelay}propValues2=1×2 cell array
{'minutes'} {[3]}
注意观察,frd 模型 sys2 具有与 sys1 相同的属性。
对于此示例,请加载为水箱模型收集的频率响应数据。
load wtankData.mat该模型有一个输入(电压)和一个输出(水位)。
创建一个 frd 模型,指定输入名称和输出名称。
sys = frd(response,frequency,'InputName','Voltage','OutputName','Height');
绘制频率响应。
bode(sys)

输入名称和输出名称显示在波特图上。在处理 MIMO 系统的响应图时,命名输入和输出可能很有用。
对于此示例,计算以下状态空间模型的 frd 模型:
使用状态空间矩阵创建状态空间模型。
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
将状态空间模型 ltiSys 转换为频率在 0.01 至 100 rad/s 之间的 frd 模型。
w = logspace(-2,2,50); sys = frd(ltiSys,w);
比较频率响应。
bode(ltiSys,'b',sys,'r--')
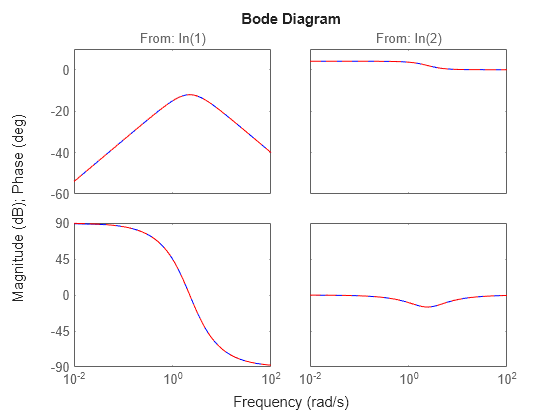
响应完全相同。
要创建 frd 模型数组,您可以指定一个频率响应数据的多维数组。
例如,当您将响应数据指定为大小为 [NY NU NF S1 ... Sn] 的数值数组时,该函数会返回一个 S1×...×Sn 的 frd 模型数组。这些模型中的每个模型具有 NY 个输出、NU 个输入和 NF 个频率点。
生成一个 2×3 的随机响应数据数组,其中每个模型具有一个输出、两个输入,包含频率在 0.1 至 10 rad/s 之间的 10 个频率点。
w = logspace(-1,1,10); r = randn(1,2,10,2,3)+1i*randn(1,2,10,2,3); sys = frd(r,w);
从该模型数组中提取索引 (2,1) 处的模型。
sys21 = sys(:,:,2,1)
sys21 =
From input 1 to:
Frequency(rad/s) output 1
---------------- --------
0.1000 0.6715 + 0.0229i
0.1668 0.7172 - 1.7502i
0.2783 0.4889 - 0.8314i
0.4642 0.7269 - 1.1564i
0.7743 0.2939 - 2.0026i
1.2915 0.8884 + 0.5201i
2.1544 -1.0689 - 0.0348i
3.5938 -2.9443 + 1.0187i
5.9948 0.3252 - 0.7145i
10.0000 1.3703 - 0.2248i
From input 2 to:
Frequency(rad/s) output 1
---------------- --------
0.1000 -1.2075 - 0.2620i
0.1668 1.6302 - 0.2857i
0.2783 1.0347 - 0.9792i
0.4642 -0.3034 - 0.5336i
0.7743 -0.7873 + 0.9642i
1.2915 -1.1471 - 0.0200i
2.1544 -0.8095 - 0.7982i
3.5938 1.4384 - 0.1332i
5.9948 -0.7549 + 1.3514i
10.0000 -1.7115 - 0.5890i
Continuous-time frequency response.
Model Properties
您可以在 frd 对象中指定负频率值。当您想要捕获具有复系数的模型的频率响应数据时,此功能非常有用。
创建一个包含正值和负值的频率向量。
w0 = sort([-logspace(-2,2,50) 0 logspace(-2,2,50)]);
创建一个具有复系数的状态空间模型。
A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D);
将该模型转换为指定频率下的 frd 模型。
sys = frd(Gc,w0);
绘制这些模型的频率响应。
bode(Gc,'b',sys,'r--')

绘制的响应非常接近。图针对具有复系数的模型显示两个分支,一个分支用于正频率,带向右箭头;另一个分支用于负频率,带向左箭头。在这两个分支中,箭头指示频率增大的方向。
版本历史记录
在 R2006a 之前推出