ss
状态空间模型
说明
使用 ss 可创建实数值或复数值状态空间模型,也可将动态系统模型转换为状态空间模型形式。
状态空间模型是将物理系统表示为一组通过一阶微分方程相关联的输入、输出和状态变量的数学模式。状态变量定义了输出变量的值。ss 模型对象可以表示连续时间或离散时间情况下的 SISO 或 MIMO 状态空间模型。
在连续时间情况下,状态空间模型具有以下形式:
此处,x、u 和 y 分别表示状态、输入和输出,而 A、B、C 和 D 是状态空间矩阵。在离散时间中,状态空间模型采用以下形式:
ss 对象表示 MATLAB® 中的连续时间或离散时间状态空间模型,用于存储 A、B、C 和 D 及其他信息,如采样时间、I/O 名称、延迟和偏移量。
您可以通过直接指定状态、输入和输出矩阵,或通过将另一种类型的模型(如传递函数模型 tf)转换为状态空间形式来创建状态空间模型对象。有关详细信息,请参阅状态空间模型。您可以使用 ss 模型对象执行以下操作:
执行线性分析
表示线性时不变 (LTI) 模型来执行控制设计
与其他 LTI 模型结合使用来表示更复杂的系统
创建对象
语法
描述
sys = ss(___,PropertyName=Value)
sys = ss(ltiSys,component)ltiSys 的指定 component 的被测组件和/或噪声分量转换为 ss 对象。仅当 ltiSys 是辨识的 (LTI) 模型(如 idtf (System Identification Toolbox)、idss (System Identification Toolbox)、idproc (System Identification Toolbox)、idpoly (System Identification Toolbox) 或 idgrey (System Identification Toolbox) 对象)时,才使用此语法。
sys = ss(ssSys,'minimal')minreal(ss(sys)),其中矩阵 A 具有最小的可能维度。
在 SISO 的情况下,无法唯一定义状态空间形式的转换。在 MIMO 的情况下,也无法保证能够生成最小的实现。有关详细信息,请参阅Recommended Working Representation。
输入参量
输出参量
属性
对象函数
以下列表包含可用于 ss 模型对象的部分代表性函数。一般情况下,任何适用于 动态系统模型 的函数也适用于 ss 对象。
示例
创建由以下状态空间矩阵定义的 SISO 状态空间模型:
指定 A、B、C 和 D 矩阵,并创建状态空间模型。
A = [-1.5,-2;1,0]; B = [0.5;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D)
sys =
A =
x1 x2
x1 -1.5 -2
x2 1 0
B =
u1
x1 0.5
x2 0
C =
x1 x2
y1 0 1
D =
u1
y1 0
Continuous-time state-space model.
Model Properties
使用采样时间 0.25 秒和以下状态空间矩阵创建一个状态空间模型:
指定状态空间矩阵。
A = [0 1;-5 -2]; B = [0;3]; C = [0 1]; D = 0;
指定采样时间。
Ts = 0.25;
创建状态空间模型。
sys = ss(A,B,C,D,Ts);
对于此示例,假设有一个立方体绕其角旋转,惯量张量为 J,阻尼力 F 大小为 0.2。系统的输入是驱动扭矩,而输出是角速度。立方体的状态空间矩阵如下:
指定 A、B、C 和 D 矩阵,并创建连续时间状态空间模型。
J = [8 -3 -3; -3 8 -3; -3 -3 8]; F = 0.2*eye(3); A = -J\F; B = inv(J); C = eye(3); D = 0; sys = ss(A,B,C,D)
sys =
A =
x1 x2 x3
x1 -0.04545 -0.02727 -0.02727
x2 -0.02727 -0.04545 -0.02727
x3 -0.02727 -0.02727 -0.04545
B =
u1 u2 u3
x1 0.2273 0.1364 0.1364
x2 0.1364 0.2273 0.1364
x3 0.1364 0.1364 0.2273
C =
x1 x2 x3
y1 1 0 0
y2 0 1 0
y3 0 0 1
D =
u1 u2 u3
y1 0 0 0
y2 0 0 0
y3 0 0 0
Continuous-time state-space model.
Model Properties
sys 是 MIMO,因为系统包含从矩阵 C 和 D 观测到的 3 个输入和 3 个输出。有关 MIMO 状态空间模型的详细信息,请参阅 MIMO 状态空间模型。
使用以下离散时间、多输入、多输出状态矩阵和采样时间 ts = 0.2 秒创建一个状态空间模型:
指定状态空间矩阵,并创建离散时间 MIMO 状态空间模型。
A = [-7,0;0,-10]; B = [5,0;0,2]; C = [1,-4;-4,0.5]; D = [0,-2;2,0]; ts = 0.2; sys = ss(A,B,C,D,ts)
sys =
A =
x1 x2
x1 -7 0
x2 0 -10
B =
u1 u2
x1 5 0
x2 0 2
C =
x1 x2
y1 1 -4
y2 -4 0.5
D =
u1 u2
y1 0 -2
y2 2 0
Sample time: 0.2 seconds
Discrete-time state-space model.
Model Properties
创建状态空间矩阵,并指定采样时间。
A = [-0.2516 -0.1684;2.784 0.3549]; B = [0;3]; C = [0 1]; D = 0; Ts = 0.05;
创建状态空间模型,使用名称-值对组指定状态和输入名称。
sys = ss(A,B,C,D,Ts,'StateName',{'Position' 'Velocity'},... 'InputName','Force');
状态和输入名称的数目必须与 A、B、C 和 D 的维度一致。
在处理 MIMO 系统的响应图时,命名输入和输出可能很有用。
step(sys)

请注意阶跃响应图标题中的输入名称 Force。
对于此示例,创建一个状态空间模型,其中包含从另一个状态空间模型继承的相同时间和输入单位属性。假设有以下状态空间模型:
首先,创建一个状态空间模型 sys1,将 TimeUnit 和 InputUnit 属性设置为 'minutes'。
A1 = [-1.5,-2;1,0]; B1 = [0.5;0]; C1 = [0,1]; D1 = 5; sys1 = ss(A1,B1,C1,D1,'TimeUnit','minutes','InputUnit','minutes');
验证 sys1 的时间和输入单位属性是否设置为 'minutes'。
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
使用从 sys1 继承的属性创建第二个状态空间模型。
A2 = [7,-1;0,2]; B2 = [0.85;2]; C2 = [10,14]; D2 = 2; sys2 = ss(A2,B2,C2,D2,sys1);
验证 sys2 的时间和输入单位是否继承自 sys1。
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
在此示例中,您将创建一个静态增益 MIMO 状态空间模型。
假设有以下双输入双输出静态增益矩阵:
指定增益矩阵并创建静态增益状态空间模型。
D = [2,4;3,5]; sys1 = ss(D)
sys1 =
D =
u1 u2
y1 2 4
y2 3 5
Static gain.
Model Properties
计算以下传递函数的状态空间模型:
创建传递函数模型。
H = [tf([1 1],[1 3 3 2]) ; tf([1 0 3],[1 1 1])];
将此模型转换为状态空间模型。
sys = ss(H);
检查状态空间模型的大小。
size(sys)
State-space model with 2 outputs, 1 inputs, and 5 states.
状态数等于 H(s) 中 SISO 条目的累积阶数。
要获得 H(s) 的最小实现,请输入
sys = ss(H,'minimal');
size(sys)State-space model with 2 outputs, 1 inputs, and 3 states.
生成的模型的阶数为 3,这是表示 H(s) 所需的最小状态数。要查看此状态数,请将 H(s) 重构为一阶方程组和二阶方程组的乘积。
对于此示例,将辨识的多项式模型的被测组件和噪声分量提取为两个单独的状态空间模型。
在 identifiedModel.mat 中加载博克斯-詹金斯多项式模型 ltiSys。
load('identifiedModel.mat','ltiSys');
ltiSys 是辨识的离散时间模型,其形式为:,其中 表示被测组件, 表示噪声分量。
将被测组件和噪声分量提取为状态空间模型。
sysMeas = ss(ltiSys,'measured') sysMeas =
A =
x1 x2
x1 1.575 -0.6115
x2 1 0
B =
u1
x1 0.5
x2 0
C =
x1 x2
y1 -0.2851 0.3916
D =
u1
y1 0
Input delays (sampling periods): 2
Sample time: 0.04 seconds
Discrete-time state-space model.
Model Properties
sysNoise = ss(ltiSys,'noise')sysNoise =
A =
x1 x2 x3
x1 1.026 -0.26 0.3899
x2 1 0 0
x3 0 0.5 0
B =
v@y1
x1 0.25
x2 0
x3 0
C =
x1 x2 x3
y1 0.319 -0.04738 0.07106
D =
v@y1
y1 0.04556
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time state-space model.
Model Properties
被测组件可以用作被控对象模型,而噪声分量可以用作控制系统设计的扰动模型。
创建描述符形式的状态空间模型 (E ≠ I)。
a = [2 -4; 4 2]; b = [-1; 0.5]; c = [-0.5, -2]; d = [-1]; e = [1 0; -3 0.5]; sysd = dss(a,b,c,d,e);
计算系统 (E = I) 的显式实现。
syse = ss(sysd,'explicit')syse =
A =
x1 x2
x1 2 -4
x2 20 -20
B =
u1
x1 -1
x2 -5
C =
x1 x2
y1 -0.5 -2
D =
u1
y1 -1
Continuous-time state-space model.
Model Properties
确认描述符和显式实现具有等效的动态特性。
bodeplot(sysd,syse,'g--')
此示例说明如何创建同时具有固定参数和可调参数的状态空间 genss 模型。
其中 a 和 b 是可调参数,其初始值分别为 -1 和 3。
使用 realp 创建可调参数。
a = realp('a',-1); b = realp('b',3);
使用 a 和 b 的代数表达式定义一个广义矩阵。
A = [1 a+b;0 a*b];
A 是一个广义矩阵,其 Blocks 属性包含 a 和 b。A 的初始值是 [1 2;0 -3],来自 a 和 b 的初始值。
创建固定值状态空间矩阵。
B = [-3.0;1.5]; C = [0.3 0]; D = 0;
使用 ss 创建状态空间模型。
sys = ss(A,B,C,D)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 2 states, and the following blocks: a: Scalar parameter, 2 occurrences. b: Scalar parameter, 2 occurrences. Model Properties Type "ss(sys)" to see the current value and "sys.Blocks" to interact with the blocks.
sys 是一个广义 LTI 模型 (genss),具有可调参数 a 和 b。
对于此示例,假设有一个由以下状态空间矩阵定义的 SISO 状态空间模型:
假设以 0.5 秒的输入延迟和 2.5 秒的输出延迟,创建一个状态空间模型对象来表示 A、B、C 和 D 矩阵。
A = [-1.5,-2;1,0]; B = [0.5;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D,'InputDelay',0.5,'OutputDelay',2.5)
sys =
A =
x1 x2
x1 -1.5 -2
x2 1 0
B =
u1
x1 0.5
x2 0
C =
x1 x2
y1 0 1
D =
u1
y1 0
Input delays (seconds): 0.5
Output delays (seconds): 2.5
Continuous-time state-space model.
Model Properties
您还可以使用 get 命令来显示 MATLAB 对象的所有属性。
get(sys)
A: [2×2 double]
B: [2×1 double]
C: [0 1]
D: 0
E: []
Offsets: []
Scaled: 0
StateName: {2×1 cell}
StatePath: {2×1 cell}
StateUnit: {2×1 cell}
InternalDelay: [0×1 double]
InputDelay: 0.5000
OutputDelay: 2.5000
InputName: {''}
InputUnit: {''}
InputGroup: [1×1 struct]
OutputName: {''}
OutputUnit: {''}
OutputGroup: [1×1 struct]
Notes: [0×1 string]
UserData: []
Name: ''
Ts: 0
TimeUnit: 'seconds'
SamplingGrid: [1×1 struct]
有关为 LTI 模型指定时滞的详细信息,请参阅Specifying Time Delays。
对于此示例,假设有一个表示以下状态矩阵的状态空间 System object™:
使用 ss 命令创建一个状态空间对象 sys。
A = [-1.2,-1.6,0;1,0,0;0,1,0]; B = [1;0;0]; C = [0,0.5,1.3]; D = 0; sys = ss(A,B,C,D);
接下来,计算一个单位负增益的闭环状态空间模型,并找到闭环状态空间系统对象 sysFeedback 的极点。
sysFeedback = feedback(sys,1); P = pole(sysFeedback)
P = 3×1 complex
-0.2305 + 1.3062i
-0.2305 - 1.3062i
-0.7389 + 0.0000i
单位增益的反馈环是稳定的,因为所有极点都具有负实部。通过检查闭环极点,可对稳定性进行二元评估。实际上,了解稳健性有多强(或多弱)更有用。稳健性的一个标志是在失去稳定性之前环路增益会变化多少。您可以使用根轨迹图来估计环路处于稳定状态时的 k 值的范围。
rlocus(sys)
环路增益的变化只是稳健性的一个方面。一般情况下,如果被控对象建模不完善,则意味着增益和相位都无法精确得知。由于建模误差在增益穿越频率(开环增益为 0dB 的频率)附近的不利影响最严重,因此在此频率下可以容忍多大的相位变化也很重要。
您可以在波特图上显示增益和相位裕度,如下所示。
bode(sys)

grid

有关更详细的示例,请参阅评估增益裕度和相位裕度。
对于此示例,为以下矩阵表示的系统设计一个目标带宽为 0.75 弧度/秒的二自由度 PID 控制器:
使用 ss 命令创建一个状态空间对象 sys。
A = [-0.5,-0.1;1,0]; B = [1;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D)
sys =
A =
x1 x2
x1 -0.5 -0.1
x2 1 0
B =
u1
x1 1
x2 0
C =
x1 x2
y1 0 1
D =
u1
y1 0
Continuous-time state-space model.
Model Properties
使用目标带宽,通过 pidtune 生成一个二自由度控制器。
wc = 0.75;
C2 = pidtune(sys,'PID2',wc)C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 0.513, Ki = 0.0975, Kd = 0.577, b = 0.344, c = 0
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
使用类型 'PID2' 会导致 pidtune 生成一个二自由度控制器,表示为 pid2 对象。显示画面确认了此结果。显示画面还说明 pidtune 可调节所有控制器系数,包括设定值权重 b 和 c,以平衡性能和稳健性。
有关实时编辑器中的交互式 PID 调节,请参阅Tune PID Controller实时编辑器任务。此任务用于以交互方式设计 PID 控制器,并为实时脚本自动生成 MATLAB 代码。
对于独立 App 中的交互式 PID 调节,请使用 PID 调节器。有关使用该 App 设计控制器的示例,请参阅用于快速参考跟踪的 PID 控制器设计。
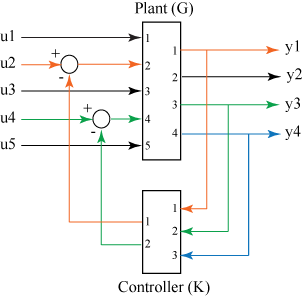
假设有一个具有五个输入与四个输出的状态空间被控对象 G 和一个具有三个输入与两个输出的状态空间反馈控制器 K。被控对象 G 的输出 1、3 和 4 必须连接到控制器 K 的输入,并且该控制器的输出连接到该被控对象的输入 4 和 2。
对于此示例,假设有两个由下面一组矩阵表示的 G 和 K 的连续时间状态空间模型:
AG = [-3,0.4,0.3;-0.5,-2.8,-0.8;0.2,0.8,-3]; BG = [0.4,0,0.3,0.2,0;-0.2,-1,0.1,-0.9,-0.5;0.6,0.9,0.5,0.2,0]; CG = [0,-0.1,-1;0,-0.2,1.6;-0.7,1.5,1.2;-1.4,-0.2,0]; DG = [0,0,0,0,-1;0,0.4,-0.7,0,0.9;0,0.3,0,0,0;0.2,0,0,0,0]; sysG = ss(AG,BG,CG,DG)
sysG =
A =
x1 x2 x3
x1 -3 0.4 0.3
x2 -0.5 -2.8 -0.8
x3 0.2 0.8 -3
B =
u1 u2 u3 u4 u5
x1 0.4 0 0.3 0.2 0
x2 -0.2 -1 0.1 -0.9 -0.5
x3 0.6 0.9 0.5 0.2 0
C =
x1 x2 x3
y1 0 -0.1 -1
y2 0 -0.2 1.6
y3 -0.7 1.5 1.2
y4 -1.4 -0.2 0
D =
u1 u2 u3 u4 u5
y1 0 0 0 0 -1
y2 0 0.4 -0.7 0 0.9
y3 0 0.3 0 0 0
y4 0.2 0 0 0 0
Continuous-time state-space model.
Model Properties
AK = [-0.2,2.1,0.7;-2.2,-0.1,-2.2;-0.4,2.3,-0.2]; BK = [-0.1,-2.1,-0.3;-0.1,0,0.6;1,0,0.8]; CK = [-1,0,0;-0.4,-0.2,0.3]; DK = [0,0,0;0,0,-1.2]; sysK = ss(AK,BK,CK,DK)
sysK =
A =
x1 x2 x3
x1 -0.2 2.1 0.7
x2 -2.2 -0.1 -2.2
x3 -0.4 2.3 -0.2
B =
u1 u2 u3
x1 -0.1 -2.1 -0.3
x2 -0.1 0 0.6
x3 1 0 0.8
C =
x1 x2 x3
y1 -1 0 0
y2 -0.4 -0.2 0.3
D =
u1 u2 u3
y1 0 0 0
y2 0 0 -1.2
Continuous-time state-space model.
Model Properties
根据反馈环中要连接的输入和输出,定义 feedout 和 feedin 向量。
feedin = [4 2]; feedout = [1 3 4]; sys = feedback(sysG,sysK,feedin,feedout,-1)
sys =
A =
x1 x2 x3 x4 x5 x6
x1 -3 0.4 0.3 0.2 0 0
x2 1.18 -2.56 -0.8 -1.3 -0.2 0.3
x3 -1.312 0.584 -3 0.56 0.18 -0.27
x4 2.948 -2.929 -2.42 -0.452 1.974 0.889
x5 -0.84 -0.11 0.1 -2.2 -0.1 -2.2
x6 -1.12 -0.26 -1 -0.4 2.3 -0.2
B =
u1 u2 u3 u4 u5
x1 0.4 0 0.3 0.2 0
x2 -0.44 -1 0.1 -0.9 -0.5
x3 0.816 0.9 0.5 0.2 0
x4 -0.2112 -0.63 0 0 0.1
x5 0.12 0 0 0 0.1
x6 0.16 0 0 0 -1
C =
x1 x2 x3 x4 x5 x6
y1 0 -0.1 -1 0 0 0
y2 -0.672 -0.296 1.6 0.16 0.08 -0.12
y3 -1.204 1.428 1.2 0.12 0.06 -0.09
y4 -1.4 -0.2 0 0 0 0
D =
u1 u2 u3 u4 u5
y1 0 0 0 0 -1
y2 0.096 0.4 -0.7 0 0.9
y3 0.072 0.3 0 0 0
y4 0.2 0 0 0 0
Continuous-time state-space model.
Model Properties
size(sys)
State-space model with 4 outputs, 5 inputs, and 6 states.
sys 是通过连接 G 和 K 的指定输入和输出获得的最终闭环状态空间模型。
自 R2024a 起
此示例说明如何线性化 Simulink® 模型并将线性化偏移量存储在 ss 模型对象的 Offsets 属性中。
打开 Simulink 模型。
mdl = 'watertankNLModel';
open_system(mdl)指定水位的初始条件。
h0 = 10;
指定模型线性分析点。
io(1) = linio('watertankNLModel/Step',1,'input'); io(2) = linio('watertankNLModel/H',1,'output');
对模型进行仿真并提取时间快照上的工作点。
tlin = [0 15 30]; op = findop(mdl,tlin);
计算线性化结果和偏移量。
options = linearizeOptions('StoreOffsets',true);
[linsys,~,info] = linearize(mdl,io,op,options);该函数返回一个状态空间模型数组 linsys 及其中的模型在 info.Offsets 中对应的线性化偏移量。
ss 模型对象的 Offsets 属性需要一个具有字段 u、y、x 和 dx 的结构体。您可以使用来自 linearize 的 info.Offsets 输出直接设置这些偏移量。
linsys.Offsets = info.Offsets; linsys.Offsets
ans=3×1 struct array with fields:
dx
x
u
y