lqi
线性二次积分控制
语法
[K,S,e] = lqi(SYS,Q,R,N)
说明
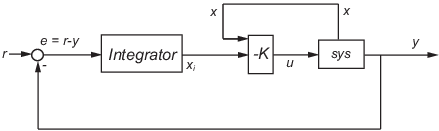
lqi 为下图所示的跟踪环计算最优状态反馈控制律。
对于具有状态空间方程(或其离散对应方程)的被控对象 sys:
状态反馈控制的形式为
其中 xi 是积分器输出。此控制律确保输出 y 跟踪参考命令 r。对于 MIMO 系统,积分器的数量等于输出 y 的维度。
[K,S,e] = lqi(SYS,Q,R,N) 基于给定的被控对象状态空间模型 SYS 和加权矩阵 Q、R 和 N,计算最优增益矩阵 K。控制律 u = –Kz = –K[x;xi] 最小化以下代价函数(对于 r = 0)
(适用于连续时间)
(适用于离散时间)
在离散时间中,lqi 使用前向欧拉公式
计算积分器输出 xi,其中 Ts 是 SYS 的采样时间。
当您省略矩阵 N 时,N 设置为 0。lqi 还返回相关联的代数黎卡提方程的解 S 和闭环特征值 e。
限制
对于以下带增强积分器的被控对象的状态空间系统:
问题数据必须满足:
对组 (A,B) 必须是可稳定的。
R 必须为正定矩阵。
必须为半正定矩阵(等效于 )。
在虚轴(或离散时间的单位圆)上必须没有无法观测的模态。
提示
lqi 支持描述符形式的模型,其中包含非奇异矩阵 E。lqi 的输出 S 是以下等效显式状态空间模型的黎卡提方程的解:
参考资料
[1] P. C. Young and J. C. Willems, "An approach to the linear multivariable servomechanism problem", International Journal of Control, Volume 15, Issue 5, May 1972 , pages 961–979.
版本历史记录
在 R2008b 中推出