lqg
线性二次高斯 (LQG) 设计
语法
reg = lqg(sys,QXU,QWV)
reg = lqg(sys,QXU,QWV,QI)
reg = lqg(sys,QXU,QWV,QI,'1dof')
reg = lqg(sys,QXU,QWV,QI,'2dof')
reg = lqg(___,'current')
[reg,info] = lqg(___)
说明
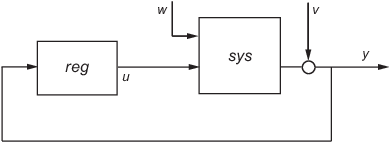
reg = lqg(sys,QXU,QWV) 根据被控对象的状态空间模型 sys 以及加权矩阵 QXU 和 QWV,计算最优线性二次高斯 (LQG) 调节器 reg。动态调节器 reg 使用测量值 y 生成控制信号 u,调节 y 使其在零值附近。使用正反馈将此调节器连接到被控对象输出 y。
LQG 调节器最小化以下代价函数
但受限于以下被控对象方程
其中过程噪声 w 和测量噪声 v 是具有协方差的高斯白噪声:
reg = lqg(sys,QXU,QWV,QI) 使用设定点命令 r 和测量值 y 生成控制信号 u。reg 具有积分作用,以确保 y 跟踪命令 r。

LQG 伺服控制器最小化以下代价函数
其中 xi 是跟踪误差 r - y 的积分。对于 MIMO 系统,r、y 和 xi 必须具有相同的长度。
reg = lqg(sys,QXU,QWV,QI,'1dof') 计算单自由度伺服控制器,其接受 e = r - y 而非 [r ; y] 作为输入。
reg = lqg(sys,QXU,QWV,QI,'2dof') 等效于 LQG(sys,QXU,QWV,QI),并生成前面所示的二自由度伺服控制器。
reg = lqg(___,'current') 使用 "current" 卡尔曼估计器,在为离散时间系统计算 LQG 调节器时,该估计器使用 x[n|n] 作为状态估计值。
[reg,info] = lqg(___) 为以上任何语法在结构体 info 中返回控制器和估计器增益矩阵。例如,您可以使用控制器和估计器增益实现 Observer 形式的控制器。有关详细信息,请参阅算法。
示例
线性二次高斯 (LQG) 调节器和伺服控制器设计
此示例说明如何为以下系统设计线性二次高斯 (LQG) 调节器、单自由度 LQG 伺服控制器和二自由度 LQG 伺服控制器。

被控对象有三个状态 (x)、两个控制输入 (u)、三个随机输入 (w)、一个输出 (y)、输出的测量噪声 (v),以及以下状态方程和测量方程:
其中
此系统具有以下噪声协方差数据:
对于调节器,使用以下代价函数来定义调节性能和控制力度之间的权衡:
对于伺服控制器,使用以下代价函数来定义跟踪器性能和控制力度之间的权衡:
要为此系统设计 LQG 控制器,请执行以下操作:
通过在 MATLAB 命令行窗口中键入以下命令创建状态空间系统:
A = [0 1 0;0 0 1;1 0 0]; B = [0.3 1;0 1;-0.3 0.9]; C = [1.9 1.3 1]; D = [0.53 -0.61]; sys = ss(A,B,C,D);
通过键入以下命令定义噪声协方差数据和加权矩阵:
nx = 3; %Number of states ny = 1; %Number of outputs Qn = [4 2 0; 2 1 0; 0 0 1]; Rn = 0.7; R = [1 0;0 2] QXU = blkdiag(0.1*eye(nx),R); QWV = blkdiag(Qn,Rn); QI = eye(ny);
通过键入以下命令构建 LQG 调节器:
此命令返回以下 LQG 调节器:KLQG = lqg(sys,QXU,QWV)
A = x1_e x2_e x3_e x1_e -6.212 -3.814 -4.136 x2_e -4.038 -3.196 -1.791 x3_e -1.418 -1.973 -1.766 B = y1 x1_e 2.365 x2_e 1.432 x3_e 0.7684 C = x1_e x2_e x3_e u1 -0.02904 0.0008272 0.0303 u2 -0.7147 -0.7115 -0.7132 D = y1 u1 0 u2 0 Input groups: Name Channels Measurement 1 Output groups: Name Channels Controls 1,2 Continuous-time model.通过键入以下命令构建单自由度 LQG 伺服控制器:
此命令返回以下 LQG 伺服控制器:KLQG1 = lqg(sys,QXU,QWV,QI,'1dof')A = x1_e x2_e x3_e xi1 x1_e -7.626 -5.068 -4.891 0.9018 x2_e -5.108 -4.146 -2.362 0.6762 x3_e -2.121 -2.604 -2.141 0.4088 xi1 0 0 0 0 B = e1 x1_e -2.365 x2_e -1.432 x3_e -0.7684 xi1 1 C = x1_e x2_e x3_e xi1 u1 -0.5388 -0.4173 -0.2481 0.5578 u2 -1.492 -1.388 -1.131 0.5869 D = e1 u1 0 u2 0 Input groups: Name Channels Error 1 Output groups: Name Channels Controls 1,2 Continuous-time model.通过键入以下命令构建二自由度 LQG 伺服控制器:
此命令返回以下 LQG 伺服控制器:KLQG2 = lqg(sys,QXU,QWV,QI,'2dof')A = x1_e x2_e x3_e xi1 x1_e -7.626 -5.068 -4.891 0.9018 x2_e -5.108 -4.146 -2.362 0.6762 x3_e -2.121 -2.604 -2.141 0.4088 xi1 0 0 0 0 B = r1 y1 x1_e 0 2.365 x2_e 0 1.432 x3_e 0 0.7684 xi1 1 -1 C = x1_e x2_e x3_e xi1 u1 -0.5388 -0.4173 -0.2481 0.5578 u2 -1.492 -1.388 -1.131 0.5869 D = r1 y1 u1 0 0 u2 0 0 Input groups: Name Channels Setpoint 1 Measurement 2 Output groups: Name Channels Controls 1,2 Continuous-time model.
提示
lqg可用于连续时间被控对象,也可用于离散时间被控对象。在离散时间中,lqg默认使用 x[n|n-1] 作为其状态估计值。要使用 x[n|n] 作为状态估计值并计算最优 LQG 控制器,请使用'current'输入参量。有关状态估计器的详细信息,请参阅kalman。为了计算 LQG 调节器,
lqg使用命令lqr和kalman。为了计算伺服控制器,lqg使用命令lqi和kalman。如果您希望更灵活地设计调节器,可以使用
lqr、kalman和lqgreg命令。如果您希望更灵活地设计伺服控制器,可以使用lqi、kalman和lqgtrack命令。有关使用这些命令以及如何确定何时使用它们的详细信息,请参阅用于调节的线性二次高斯 (LQG) 设计和具有积分作用的伺服控制器的线性二次高斯 (LQG) 设计。
算法
控制器方程为:
对于连续时间:
对于离散时间:
延迟估计器:
当前估计器:
其中,
A、B、C 和 D 是 LQG 调节器
reg的状态空间矩阵。xi 是跟踪误差 r - y 的积分。
Kx、Kw、Ki、L、Mx 和 Mw 是在
info中返回的控制器和估计器增益矩阵。
版本历史记录
在 R2006a 之前推出