kalman
设计用于状态估计的卡尔曼滤波器
语法
说明
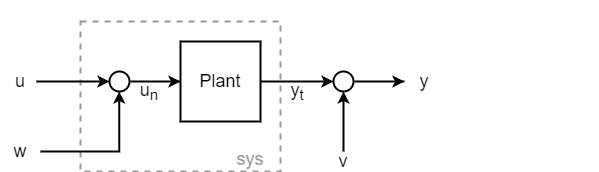
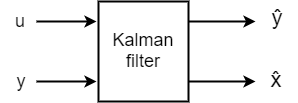
[ 根据被控对象模型 kalmf,L,P] = kalman(sys,Q,R,N)sys 以及噪声协方差数据 Q、R 和 N 创建卡尔曼滤波器。该函数计算卡尔曼滤波器,用于具有下图所示配置的卡尔曼估计器。

您使用已知输入 u 和白过程噪声输入 w 构造模型 sys,使得 w 由 sys 的最后 Nw 个输入组成。“真实”被控对象输出 yt 由 sys 的所有输出组成。您还需要提供噪声协方差数据 Q、R 和 N。返回的卡尔曼滤波器 kalmf 是一个状态空间模型,它接受已知输入 u 和含噪测量值 y,并生成真实被控对象输出的估计值 和被控对象状态的估计值 。kalman 还返回卡尔曼增益 L 和稳态误差协方差矩阵 P。
示例
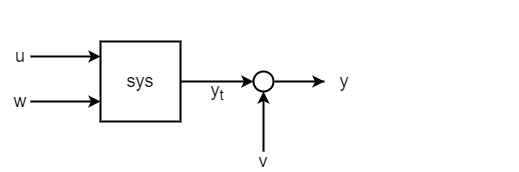
为一个在输入端存在加性白噪声 w、在输出端存在加性白噪声 v 的被控对象(如下图示)设计卡尔曼滤波器。
假设该被控对象具有以下状态空间矩阵,并且是一个未指定采样时间 (Ts = -1) 的离散时间被控对象。
A = [1.1269 -0.4940 0.1129
1.0000 0 0
0 1.0000 0];
B = [-0.3832
0.5919
0.5191];
C = [1 0 0];
D = 0;
Plant = ss(A,B,C,D,-1);
Plant.InputName = 'un';
Plant.OutputName = 'yt';要使用 kalman,您提供的模型 sys 必须包含噪声 w 作为独立输入。因此,sys 与 Plant 不同,因为 Plant 接受输入 un = u + w。您可以通过为噪声输入创建一个求和结点来构造 sys。
Sum = sumblk('un = u + w'); sys = connect(Plant,Sum,{'u','w'},'yt');
等效地,您也可以使用 sys = Plant*[1 1]。
指定噪声协方差。由于该被控对象包含一个噪声输入和一个输出,因此这些值都是标量。实际上,这些值是您的系统中噪声源的属性,您可以通过测量或根据系统的其他信息来源来确定。对于此示例,假设两个噪声源都具有单位协方差且不相关 (N = 0)。
Q = 1; R = 1; N = 0;
设计滤波器。
[kalmf,L,P] = kalman(sys,Q,R,N); size(kalmf)
State-space model with 4 outputs, 2 inputs, and 3 states.
卡尔曼滤波器 kalmf 是一种具有两个输入和四个输出的状态空间模型。kalmf 接受被控对象输入信号 u 和含噪被控对象输出 作为输入。第一个输出是估计的真实被控对象输出 。其余三个输出是状态估计值 。检查 kalmf 的输入和输出名称,了解 kalman 是如何相应地为它们设置标签的。
kalmf.InputName
ans = 2×1 cell
{'u' }
{'yt'}
kalmf.OutputName
ans = 4×1 cell
{'yt_e'}
{'x1_e'}
{'x2_e'}
{'x3_e'}
检查卡尔曼增益 L。对于具有三个状态的 SISO 被控对象,L 是一个三元素列向量。
L
L = 3×1
0.3586
0.3798
0.0817
有关说明如何使用 kalmf 减少由噪声引起的测量误差的示例,请参阅卡尔曼滤波。
假设有一个具有三个输入(其中一个输入代表过程噪声 w)和两个测量输出的被控对象。该被控对象具有四个状态。
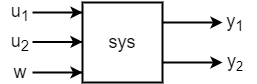
假设有以下状态空间矩阵,创建 sys。
A = [-0.71 0.06 -0.19 -0.17;
0.06 -0.52 -0.03 0.30;
-0.19 -0.03 -0.24 -0.02;
-0.17 0.30 -0.02 -0.41];
B = [ 1.44 2.91 0;
-1.97 0.83 -0.27;
-0.20 1.39 1.10;
-1.2 0 -0.28];
C = [ 0 -0.36 -1.58 0.28;
-2.05 0 0.51 0.03];
D = zeros(2,3);
sys = ss(A,B,C,D);
sys.InputName = {'u1','u2','w'};
sys.OutputName = {'y1','y2'};由于该被控对象只有一个过程噪声输入,因此协方差 Q 是标量。对于此示例,假设该过程噪声具有单位协方差。
Q = 1;
kalman 利用 Q 的维度来确定哪些输入是已知输入,哪些是噪声输入。对于标量 Q,kalman 假设只有一个噪声输入,且使用最后一个输入,除非您另行指定(参见具有未测量输出的被控对象)。
对于两个输出上的测量噪声,指定一个 2×2 的噪声协方差矩阵。对于此示例,为第一个输出使用单位方差,为第二个输出使用方差 1.3。将非对角线值设置为 0,以指示两个噪声通道不相关。
R = [1 0;
0 1.3];设计卡尔曼滤波器。
[kalmf,L,P] = kalman(sys,Q,R);
检查输入和输出。kalman 使用 kalmf 的 InputName、OutputName、InputGroup 和 OutputGroup 属性来帮助您跟踪 kalmf 的输入和输出所代表的含义。
kalmf.InputGroup
ans = struct with fields:
KnownInput: [1 2]
Measurement: [3 4]
kalmf.InputName
ans = 4×1 cell
{'u1'}
{'u2'}
{'y1'}
{'y2'}
kalmf.OutputGroup
ans = struct with fields:
OutputEstimate: [1 2]
StateEstimate: [3 4 5 6]
kalmf.OutputName
ans = 6×1 cell
{'y1_e'}
{'y2_e'}
{'x1_e'}
{'x2_e'}
{'x3_e'}
{'x4_e'}
因此,两个已知输入 u1 和 u2 是 kalmf 的前两个输入,两个测量输出 y1 和 y2 是 kalmf 的最后两个输入。对于 kalmf 的输出,前两个是估计输出,其余四个是状态估计值。要使用卡尔曼滤波器,请以类似于卡尔曼滤波中针对 SISO 被控对象所示的方式将这些输入连接到被控对象和噪声信号。
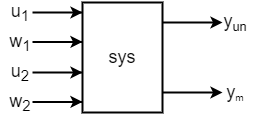
假设有一个具有四个输入和两个输出的被控对象。第一个和第三个输入是已知的,而第二个和第四个输入代表过程噪声。该被控对象也具有两个输出,但只有第二个输出被测量。
使用以下状态空间矩阵创建 sys。
A = [-0.37 0.14 -0.01 0.04;
0.14 -1.89 0.98 -0.11;
-0.01 0.98 -0.96 -0.14;
0.04 -0.11 -0.14 -0.95];
B = [-0.07 -2.32 0.68 0.10;
-2.49 0.08 0 0.83;
0 -0.95 0 0.54;
-2.19 0.41 0.45 0.90];
C = [ 0 0 -0.50 -0.38;
-0.15 -2.12 -1.27 0.65];
D = zeros(2,4);
sys = ss(A,B,C,D,-1); % Discrete with unspecified sample time
sys.InputName = {'u1','w1','u2','w2'};
sys.OutputName = {'yun','ym'};要使用 kalman 为此系统设计滤波器,请使用 known 和 sensors 输入参量来指定被控对象的哪些输入是已知的,哪些输出被测量。
known = [1 3]; sensors = [2];
指定噪声协方差并设计滤波器。
Q = eye(2); R = 1; N = 0; [kalmf,L,P] = kalman(sys,Q,R,N,sensors,known);
检查 kalmf 的输入和输出标签,可了解滤波器期望的输入及其返回的输出。
kalmf.InputGroup
ans = struct with fields:
KnownInput: [1 2]
Measurement: 3
kalmf.InputName
ans = 3×1 cell
{'u1'}
{'u2'}
{'ym'}
kalmf 接受 sys 的两个已知输入和 sys 的含噪测量输出作为输入。
kalmf.OutputGroup
ans = struct with fields:
OutputEstimate: 1
StateEstimate: [2 3 4 5]
kalmf 的第一个输出是其对测量被控对象输出真实值的估计。其余输出是状态估计值。
输入参数
含过程噪声的被控对象模型,指定为状态空间 (ss) 模型。该被控对象具有已知输入 u 和白过程噪声输入 w。被控对象输出 yt 不包含测量噪声。
您可以将此类被控对象模型的状态空间矩阵写为:
kalman 假设输出端存在高斯噪声 v。因此,在连续时间中,kalman 所处理的状态空间方程为:
在离散时间中,状态空间方程为:
如果您不使用 known 输入参量,kalman 会利用 Q 的大小来确定 sys 的哪些输入是噪声输入。在这种情况下,kalman 将最后 Nw = size(Q,1) 个输入视为噪声输入。当噪声输入 w 不是 sys 的最后几个输入时,您可以使用 known 输入参量来指定哪些被控对象输入是已知的。kalman 会将其余输入视为随机输入。
有关被控对象矩阵属性的附加约束,请参阅限制。
测量噪声协方差,指定为标量或 Ny×Ny 矩阵,其中 Ny 是被控对象输出数。kalman 假设测量噪声 v 是白噪声,其协方差为 R = E(vvT)。当被控对象只有一个输出通道时,R 是标量,等于 v 的方差。当被控对象具有多个输出通道且测量噪声不相关时,R 是对角矩阵。在实际操作中,您可以通过测量或对您的系统的噪声属性进行有根据的猜测来确定 R 的适当值。
有关测量噪声协方差的附加约束,请参阅限制。
噪声互协方差,指定为标量或 Nw×Ny 矩阵。kalman 假设过程噪声 w 和测量噪声 v 满足 N = E(wvT)。如果两个噪声源不相关,则可以省略 N,这相当于设置 N = 0。在实际操作中,您可以通过测量或对您的系统的噪声属性进行有根据的猜测来确定 N 的适当值。
sys 的测量输出,指定为标识 sys 的哪些输出会被测量的索引向量。例如,假设您的系统有三个输出,但只有其中两个输出会被测量,对应于 sys 的第一个和第三个输出。在这种情况下,设置 sensors = [1 3]。
sys 的已知输入,指定为标识哪些输入是已知的(确定性的)的索引向量。例如,假设您的系统有三个输入,但只有第一个和第二个输入是已知的。在这种情况下,设置 known = [1 2]。kalman 会将 sys 的其余输入解释为随机输入。
输出参量
离散时间系统的状态估计器的新信息增益,以数组形式返回。
仅当 type = 'current'(这是离散时间系统的默认估计器)时,Mx 和 My 才相关。对于连续时间 sys 或 type = 'delayed',则 Mx = My = []。
对于 'current' 类型估计器,Mx 和 My 是更新方程中的新信息增益:
当噪声输入 w 到被控对象输出 y 没有直接馈通时(即,当 H = 0 时,参见离散时间估计),则 ,输出估计值简化为 。
数组 Mx 和 My 的维度取决于 sys 的维度,如下所述。
Mx- Nx×Ny,其中 Nx 是被控对象中的状态数,Ny 是输出数。My- Ny×Ny.
有关 kalman 如何获得 Mx 和 My 的详细信息,请参阅离散时间估计。
限制
被控对象和噪声数据必须满足:
(C,A) 可检测到,其中:
且 ,其中
在连续时间的虚轴上或离散时间的单位圆上没有不可控模式。
算法
版本历史记录
在 R2006a 之前推出