bode
动态系统的波特频率响应
语法
说明
bode(___) 使用所有先前输入参量组合的默认绘图选项绘制 sys 的频率响应图。该图显示了系统响应的幅值(以 dB 为单位)和相位(以度为单位)随频率变化的函数关系。如需更多绘图自定义选项,请使用 bodeplot。
要在同一图上绘制多个动态系统的响应,您可以将
sys指定为以逗号分隔的模型列表。例如,bode(sys1,sys2,sys3)在同一图上绘制三个模型的响应。要为图中的每个系统分别指定一种颜色、线型和标记,请为每个系统指定
LineSpec值。例如,bode(sys1,LineSpec1,sys2,LineSpec2)绘制两个模型并指定它们的绘图样式。有关指定LineSpec值的详细信息,请参阅bodeplot。
示例
创建以下连续时间 SISO 动态系统的波特图。
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); bode(H)
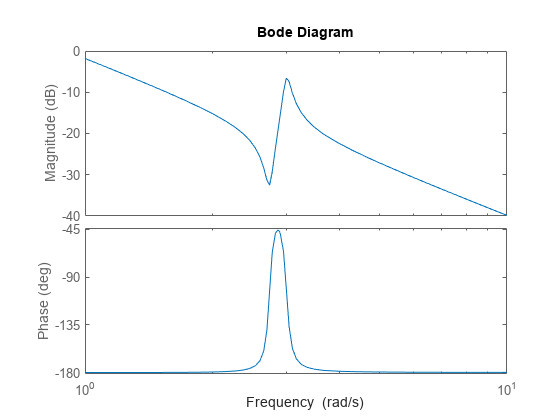
bode 根据系统动态特性自动选择绘图范围。
基于指定的频率范围创建波特图。当您要关注特定频率范围内的动态特性时,请使用这种方法。
H = tf([-0.1,-2.4,-181,-1950],[1,3.3,990,2600]);
bode(H,{1,100})
grid on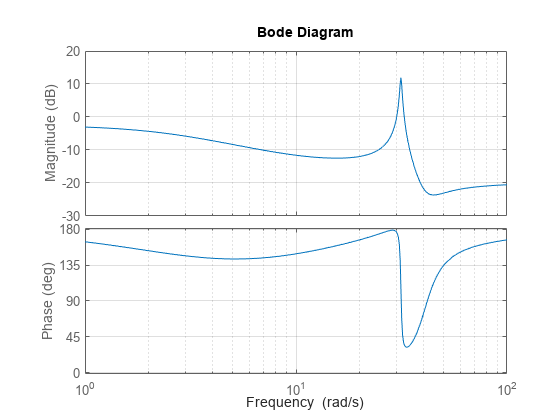
元胞数组 {1,100} 指定波特图中的最小和最大频率值。当您以这种方式提供频率界限时,该函数会选择频率响应数据的中间点。
或者,指定用于计算和绘制频率响应的频率点向量。
w = [1 5 10 15 20 23 31 40 44 50 85 100]; bode(H,w,'.-') grid on

bode 仅绘制在指定频率下的频率响应。
在同一波特图上比较连续时间系统和等效的离散系统的频率响应。
创建连续时间和离散时间动态系统。
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);
Hd = c2d(H,0.5,'zoh');创建一个显示这两个系统的波特图。
bode(H,Hd)

离散时间系统的波特图包括一条用于标记系统的奈奎斯特频率的垂直线。
使用 LineSpec 输入参量为波特图中的每个系统指定线型、颜色或标记。
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); Hd = c2d(H,0.5,'zoh'); bode(H,'r',Hd,'b--')

第一个 LineSpec,即 'r',为 H 的响应指定红色实线。第二个 LineSpec,即 'b--',为 Hd 的响应指定蓝色虚线。
计算一个 SISO 系统的频率响应的幅值和相位。
如果不指定频率,bode 会根据系统动态特性选择频率,并在第三个输出参量中返回这些频率。
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); [mag,phase,wout] = bode(H);
由于 H 是 SISO 模型,因此 mag 和 phase 的前两个维度均为 1。第三个维度是 wout 中频率的数目。
size(mag)
ans = 1×3
1 1 41
length(wout)
ans = 41
因此,沿 mag 的第三个维度的每个条目给出在 wout 中的对应频率下的响应的幅值。
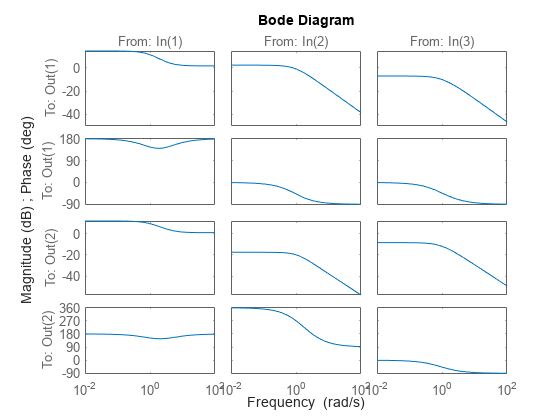
对于此示例,创建一个 2 输出 3 输入的系统。
rng(0,'twister'); % For reproducibility H = rss(4,2,3);
对于此系统,bode 在一个图窗中的一个单独绘图中绘制每个 I/O 通道的频率响应。
bode(H)
计算这些响应在 1 和 10 弧度之间的 20 个频率下的幅值和相位。
w = logspace(0,1,20); [mag,phase] = bode(H,w);
mag 和 phase 是三维数组,其中前两个维度对应于 H 的输出和输入维度,第三个维度是频率的数目。例如,检查 mag 的维度。
size(mag)
ans = 1×3
2 3 20
因此可以得到如下示例:mag(1,3,10) 是从第三个输入到第一个输出的响应的幅值,在 w 中的第 10 个频率处计算。同样,phase(1,3,10) 包含相同响应的相位。
将根据输入/输出数据辨识的参数化模型的频率响应与使用相同数据辨识的非参数化模型进行比较。
基于数据辨识参数化和非参数化模型。
load iddata2 z2; w = linspace(0,10*pi,128); sys_np = spa(z2,[],w); sys_p = tfest(z2,2);
使用 spa 和 tfest 命令需要 System Identification Toolbox™ 软件。
sys_np 是非参数化辨识模型。sys_p 是参数化辨识模型。
创建一个包含这两个系统的波特图。
bode(sys_np,sys_p,w); legend('sys-np','sys-p')
右键点击该波特图并选择特征 > 置信域可在波特图上显示置信域。
计算一个辨识模型的幅值和相位的标准差。使用此数据创建响应不确定性的 3σ 图。
基于数据辨识一个传递函数模型。获取频率响应的幅值和相位的标准差数据。
load iddata2 z2; sys_p = tfest(z2,2); w = linspace(0,10*pi,128); [mag,ph,w,sdmag,sdphase] = bode(sys_p,w);
使用 tfest 命令需要 System Identification Toolbox™ 软件。
sys_p 是一个辨识传递函数模型。sdmag 和 sdphase 分别包含频率响应的幅值和相位的标准差数据。
使用标准差数据创建一个对应于置信域的 3σ 图。
mag = squeeze(mag); sdmag = squeeze(sdmag); semilogx(w,mag,'b',w,mag+3*sdmag,'k:',w,mag-3*sdmag,'k:');

在同一图上创建一个具有复系数的模型和一个具有实系数的模型的波特图。
rng(0) A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D); Gr = rss(5); bodeplot(Gc,Gr) legend("Complex-coefficient model","Real-coefficient model",Location="southwest");
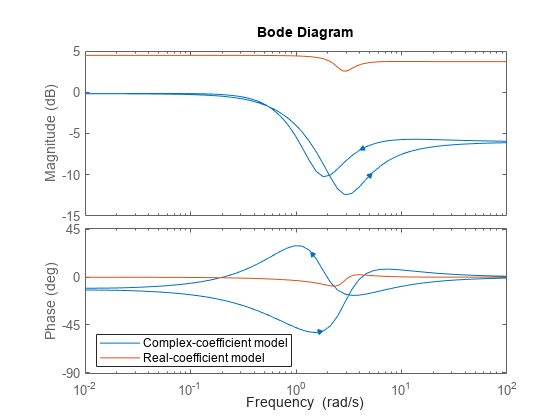
在对数频率刻度中,图显示复系数模型的两个分支,一个分支用于正频率,带向右箭头;另一个分支用于负频率,带向左箭头。在这两个分支中,箭头指示频率增大的方向。实系数模型的图始终包含没有箭头的单个分支。
右键点击波特图并选择属性可更改波特图的频率范围。在属性编辑器对话框的单位选项卡中,将频率刻度设置为 linear scale。您也可以使用 bodeplot 函数并修改返回的图对象。
bp = bodeplot(Gc,Gr); bp.FrequencyScale = "linear"; legend("Complex-coefficient model","Real-coefficient model",Location="southwest");
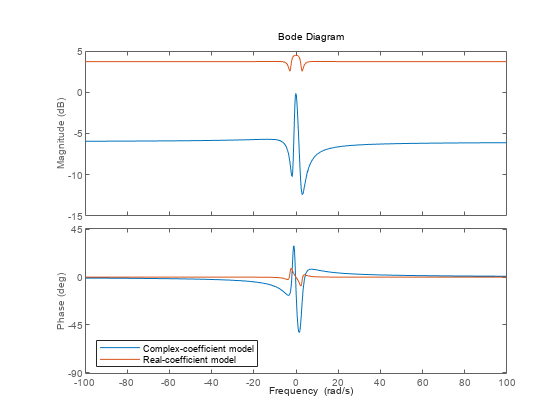
在线性频率刻度中,图显示单个分支,其对称频率范围以频率值零为中心。该图还显示在同时绘制复系数模型和实系数模型的响应时,实系数模型响应频率为负。
输入参数
输出参量
提示
当您需要额外的绘图自定义选项时,请改用
bodeplot。使用
bode创建的绘图不支持以字符串数组或字符向量元胞数组形式指定的多行标题或标签。要指定多行标题和标签,请使用包含newline字符的单个字符串。bode(sys) title("first line" + newline + "second line");
算法
软件通过如下步骤计算频率响应: