tf
传递函数模型
说明
使用 tf 创建实数值或复数值传递函数模型,或将动态系统模型转换为传递函数形式。
传递函数是线性时不变系统的频域表示。例如,假设有由传递函数 sys(s) = N(s)/D(s) 表示的连续时间 SISO 动态系统,其中 s = jw 且 N(s) 和 D(s) 分别称为分子和分母多项式。tf 模型对象可以表示连续时间或离散时间的 SISO 或 MIMO 传递函数。
您可以通过直接指定其系数或通过将另一种类型的模型(如状态空间模型 ss)转换为传递函数形式来创建传递函数模型对象。有关详细信息,请参阅传递函数。
您还可以使用 tf 来创建广义状态空间 (genss) 模型或不确定状态空间 (uss (Robust Control Toolbox)) 模型。
创建对象
语法
描述
创建传递函数模型
sys = tf(numerator,denominator)Numerator 和 Denominator 属性。例如,假设有由传递函数 sys(s) = N(s)/D(s) 表示的连续时间 SISO 动态系统,输入参量 numerator 和 denominator 分别是 N(s) 和 D(s) 的系数。
sys = tf(numerator,denominator,ts)Numerator、Denominator 和 Ts 属性。例如,假设有由传递函数 sys(z) = N(z)/D(z) 表示的离散时间 SISO 动态系统,输入参量 numerator 和 denominator 分别是 N(z) 和 D(z) 的系数。要保留采样时间为未指定状态,请将 ts 输入参量设置为 -1。
sys = tf(numerator,denominator,ltiSys)ltiSys 继承的属性(包括采样时间)创建一个传递函数模型。
sys = tf(___,PropertyName=Value)
转换为传递函数模型
sys = tf(ltiSys,Name=Value)ltiSys 的截断传递函数表示。由于这种方法会为每个输入-输出对组计算零点,因此最适合输入-输出规模较小的模型。 (自 R2025a 起)
输入参量
名称-值参数
输出参量
属性
对象函数
以下列表包含可用于 tf 模型的部分代表性函数。一般情况下,任何适用于 动态系统模型 的函数也适用于 tf 对象。
示例
对于此示例,假设有以下 SISO 传递函数模型:
以 s 的降幂顺序指定分子和分母系数,并创建传递函数模型。
numerator = 1; denominator = [2,3,4]; sys = tf(numerator,denominator)
sys =
1
---------------
2 s^2 + 3 s + 4
Continuous-time transfer function.
Model Properties
对于此示例,假设有以下离散时间 SISO 传递函数模型:
以 z 的降幂顺序指定分子和分母系数,并指定采样时间为 0.1 秒。创建离散时间传递函数模型。
numerator = [2,0]; denominator = [4,0,3,-1]; ts = 0.1; sys = tf(numerator,denominator,ts)
sys =
2 z
---------------
4 z^3 + 3 z - 1
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
对于此示例,假设有一个传递函数模型,它表示具有已知固有频率和阻尼比的二阶系统。
二阶系统的传递函数用其阻尼比 和固有频率 表示,如下所示:
假设阻尼比 = 0.25,固有频率 = 3 弧度/秒,用它们来创建该二阶传递函数。
zeta = 0.25; w0 = 3; numerator = w0^2; denominator = [1,2*zeta*w0,w0^2]; sys = tf(numerator,denominator)
sys =
9
---------------
s^2 + 1.5 s + 9
Continuous-time transfer function.
Model Properties
检查此传递函数对阶跃输入的响应。
stepplot(sys)
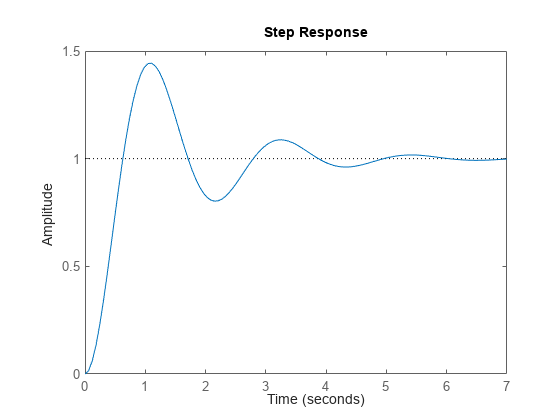
上图显示具有低阻尼比的二阶系统的预期衰荡。
创建离散时间多输入多输出模型的传递函数:
采样时间为 ts = 0.2 秒。
将分子系数指定为 2×2 矩阵。
numerators = {1 [1 0];[-1 2] 3};将公分母的系数指定为一个行向量。
denominator = [1 0.3];
创建离散时间 MIMO 传递函数模型。
ts = 0.2; sys = tf(numerators,denominator,ts)
sys =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
有关创建 MIMO 传递函数的详细信息,请参阅 MIMO 传递函数。
在此示例中,您需要通过串联 SISO 传递函数模型来创建一个 MIMO 传递函数模型。假设有以下单输入双输出传递函数:
通过串联 SISO 条目来指定 MIMO 传递函数模型。
sys1 = tf([1 -1],[1 1]); sys2 = tf([1 2],[1 4 5]); sys = [sys1;sys2]
sys =
From input to output...
s - 1
1: -----
s + 1
s + 2
2: -------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
有关创建 MIMO 传递函数的详细信息,请参阅 MIMO 传递函数。
对于此示例,请使用有理式创建一个连续时间传递函数模型。使用有理式有时比指定分子和分母的多项式系数更容易、更直观。
假设有以下系统:
要创建传递函数模型,请首先将 s 指定为 tf 对象。
s = tf('s')s = s Continuous-time transfer function. Model Properties
在有理式中使用 s 创建传递函数模型。
sys = s/(s^2 + 2*s + 10)
sys =
s
--------------
s^2 + 2 s + 10
Continuous-time transfer function.
Model Properties
对于此示例,请使用有理式创建一个离散时间传递函数模型。使用有理式有时比指定多项式系数更容易、更直观。
假设有以下系统:
要创建传递函数模型,请首先将 z 指定为 tf 对象,并将采样时间指定为 Ts。
ts = 0.1;
z = tf('z',ts)z = z Sample time: 0.1 seconds Discrete-time transfer function. Model Properties
在有理式中使用 z 创建传递函数模型。
sys = (z - 1) / (z^2 - 1.85*z + 0.9)
sys =
z - 1
------------------
z^2 - 1.85 z + 0.9
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
对于此示例,请使用从另一个传递函数模型继承的属性创建一个传递函数模型。假设有以下两个传递函数:
对于此示例,请创建 sys1 并将 TimeUnit 和 InputDelay 属性设置为 'minutes'。
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputUnit','minutes')
sys1 =
2 s
---------
s^2 + 8 s
Continuous-time transfer function.
Model Properties
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
使用从 sys1 继承的属性创建第二个传递函数模型。
numerator2 = [1,-1]; denominator2 = [7,2,0,0,9]; sys2 = tf(numerator2,denominator2,sys1)
sys2 =
s - 1
-----------------
7 s^4 + 2 s^3 + 9
Continuous-time transfer function.
Model Properties
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
注意观察,传递函数模型 sys2 具有与 sys1 相同的属性。
您可以使用 for 循环来指定一个传递函数模型数组。
首先,为传递函数数组预分配零值。
sys = tf(zeros(1,1,3));
前两个索引表示模型的输出和输入数目,而第三个索引是数组中模型的数目。
在 for 循环中使用有理式创建传递函数模型数组。
s = tf('s'); for k = 1:3 sys(:,:,k) = k/(s^2+s+k); end sys
sys(:,:,1,1) =
1
-----------
s^2 + s + 1
sys(:,:,2,1) =
2
-----------
s^2 + s + 2
sys(:,:,3,1) =
3
-----------
s^2 + s + 3
3x1 array of continuous-time transfer functions.
Model Properties
对于此示例,计算以下状态空间模型的传递函数:
使用状态空间矩阵创建状态空间模型。
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
将状态空间模型 ltiSys 转换为传递函数。
sys = tf(ltiSys)
sys =
From input 1 to output:
s
-------------
s^2 + 4 s + 5
From input 2 to output:
s^2 + 5 s + 8
-------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
对于此示例,将辨识的多项式模型的被测组件和噪声分量提取为两个单独的传递函数。
在 identifiedModel.mat 中加载博克斯-詹金斯多项式模型 ltiSys。
load('identifiedModel.mat','ltiSys');
ltiSys 是辨识的离散时间模型,其形式为:,其中 表示被测组件, 表示噪声分量。
将被测组件和噪声分量提取为传递函数。
sysMeas = tf(ltiSys,'measured') sysMeas =
From input "u1" to output "y1":
-0.1426 z^-1 + 0.1958 z^-2
z^(-2) * ----------------------------
1 - 1.575 z^-1 + 0.6115 z^-2
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
sysNoise = tf(ltiSys,'noise')sysNoise =
From input "v@y1" to output "y1":
0.04556 + 0.03301 z^-1
----------------------------------------
1 - 1.026 z^-1 + 0.26 z^-2 - 0.1949 z^-3
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
被测组件可以用作被控对象模型,而噪声分量可以用作控制系统设计的扰动模型。
传递函数模型对象包括模型数据,这些数据有助于您跟踪模型所表示的内容。例如,您可以为模型的输入和输出指定名称。
假设有以下连续时间 MIMO 传递函数模型:
该模型有一个输入 电流,有两个输出 扭矩和角速度。
首先,指定模型的分子和分母系数。
numerators = {[1 1] ; 1};
denominators = {[1 2 2] ; [1 0]};创建传递函数模型,指定输入名称和输出名称。
sys = tf(numerators,denominators,'InputName','Current',... 'OutputName',{'Torque' 'Angular Velocity'})
sys =
From input "Current" to output...
s + 1
Torque: -------------
s^2 + 2 s + 2
1
Angular Velocity: -
s
Continuous-time transfer function.
Model Properties
对于此示例,请使用 'Variable' 属性指定离散时间传递函数模型中的多项式排序。
假设有以下离散时间传递函数,其采样时间为 0.1 秒:
通过指定 z 系数,创建第一个离散时间传递函数。
numerator = [1,0,0]; denominator = [1,2,3]; ts = 0.1; sys1 = tf(numerator,denominator,ts)
sys1 =
z^2
-------------
z^2 + 2 z + 3
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
sys1 的系数按 z 的降幂顺序排列。
tf 根据 'Variable' 属性的值切换约定。由于 sys2 是 sys1 的逆传递函数模型,因此请将 'Variable' 指定为 'z^-1' 并使用相同的分子和分母系数。
sys2 = tf(numerator,denominator,ts,'Variable','z^-1')
sys2 =
1
-------------------
1 + 2 z^-1 + 3 z^-2
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
sys2 的系数现在以 z^-1 的升幂顺序排列。
根据不同约定,您可以使用 'Variable' 属性在传递函数模型中指定多项式排序。
在此示例中,您将创建具有一个可调参数 a 的低通滤波器:
由于 tunableTF 模块的分子和分母系数是独立的,您无法用 tunableTF 来表示 F。在这种情况下,您可以使用可调实数参数对象 realp 来构造 F。
创建一个初始值为 10 的实数可调参数。
a = realp('a',10)a =
Name: 'a'
Value: 10
Minimum: -Inf
Maximum: Inf
Free: 1
Real scalar parameter.
使用 tf 创建可调低通滤波器 F。
numerator = a; denominator = [1,a]; F = tf(numerator,denominator)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 1 states, and the following blocks: a: Scalar parameter, 2 occurrences. Model Properties Type "ss(F)" to see the current value and "F.Blocks" to interact with the blocks.
F 是一个 genss 对象,在其 Blocks 属性中具有可调参数 a。您可以将 F 与其他可调模型或数值模型连接,以创建更复杂的控制系统模型。有关示例,请参阅Control System with Tunable Components。
此示例中,您将创建一个静态增益 MIMO 传递函数模型。
假设有以下双输入双输出静态增益矩阵 m:
指定增益矩阵并创建静态增益传递函数模型。
m = [2,4;...
3,5];
sys1 = tf(m)sys1 = From input 1 to output... 1: 2 2: 3 From input 2 to output... 1: 4 2: 5 Static gain. Model Properties
您可以使用上面获得的静态增益传递函数模型 sys1 将其与另一个传递函数模型级联。
对于此示例,创建另一个双输入双输出离散传递函数模型,并使用 series 函数连接这两个模型。
numerators = {1,[1,0];[-1,2],3};
denominator = [1,0.3];
ts = 0.2;
sys2 = tf(numerators,denominator,ts)sys2 =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
sys = series(sys1,sys2)
sys =
From input 1 to output...
3 z^2 + 2.9 z + 0.6
1: -------------------
z^2 + 0.6 z + 0.09
-2 z^2 + 12.4 z + 3.9
2: ---------------------
z^2 + 0.6 z + 0.09
From input 2 to output...
5 z^2 + 5.5 z + 1.2
1: -------------------
z^2 + 0.6 z + 0.09
-4 z^2 + 21.8 z + 6.9
2: ---------------------
z^2 + 0.6 z + 0.09
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
自 R2025a 起
此示例说明如何获得稀疏状态空间模型的截断传递函数模型。此示例使用了一个通过对圆柱杆中热分布的热模型进行线性化得到的稀疏模型。
加载模型数据。
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
w = logspace(-7,-1,20);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
分析该模型的频率响应。
sigmaplot(sys,w)
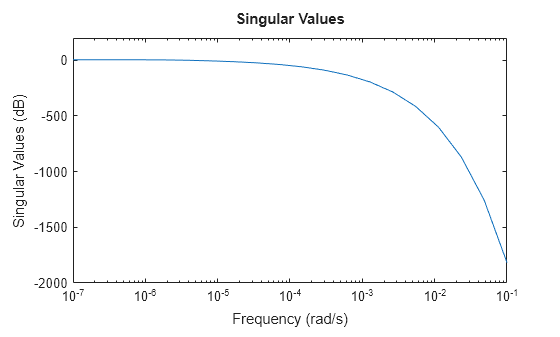
为了获得截断逼近,请使用 tf 并指定关注的频带。对于此模型,您可以使用 0 弧度/秒到 0.01 弧度/秒的频率范围来获得低阶逼近。
tsys = tf(sys,Focus=[0 1e-2],Display="off");比较频率响应。
sigmaplot(sys,tsys,w)

此热模型在超过 0.001 弧度/秒后具有非常陡峭的滚降。默认情况下,使用 tf 获得的降阶模型在此滚降特性上无法很好地匹配。为了解决这个问题,您可以使用 tf 的 RollOff 参量,并指定超过关注的频带后的最小滚降值。请指定滚降斜率值为 -45,该值对应于至少 –900 db/十倍频程的速率。
tsys2 = tf(sys,Focus=[0 1e-2],RollOff=-45,Display="off");
sigmaplot(sys,tsys2,w)
现在,降阶模型对滚降值的逼近效果要好得多。然而,在此示例中,使用 tf 重新调整滚降斜率需要重新计算零极点。对于大型模型来说,这意味着计算成本可能相当高。作为替代方案,您可以在软件计算零极点完毕后,使用 reducespec 的零极点截断方法并调整滚降,而无需额外的计算成本。有关示例,请参阅Zero-Pole Truncation of Thermal Model。
限制
传递函数模型不适合数值计算。创建传递函数模型后,在将它们与其他模型结合或执行模型变换之前,请将它们变换为状态空间形式。然后,您可以将生成的模型转换回传递函数形式以进行检查。
使用
tf无法将辨识的非线性模型直接转换为传递函数模型。要获得传递函数模型,请执行下列步骤:使用
linapp(System Identification Toolbox)、idnlarx/linearize(System Identification Toolbox) 或idnlhw/linearize(System Identification Toolbox) 将非线性辨识模型转换为辨识的 LTI 模型。然后,使用
tf将生成的模型转换为传递函数模型。
算法
为了转换稀疏模型,tf 使用 Krylov--Schur 算法 [1] 进行逆幂迭代,以计算指定频率带内的零极点。
参考
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.