c2d
将模型从连续时间转换为离散时间
说明
示例
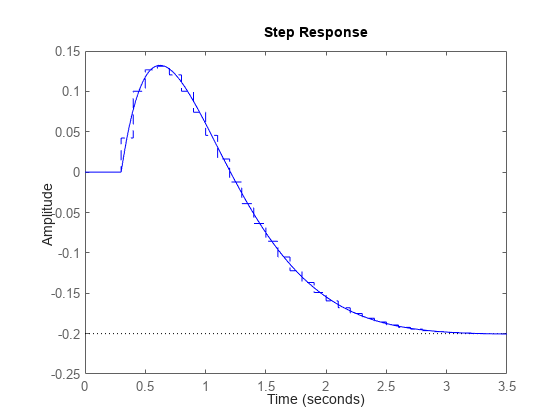
将以下连续时间传递函数离散化:
此系统的输入延迟为 0.3 秒。使用采样时间 Ts = 0.1 秒的三角形(一阶保持)逼近对系统进行离散化。
H = tf([1 -1],[1 4 5],'InputDelay', 0.3); Hd = c2d(H,0.1,'foh');
比较连续时间和离散系统的阶跃响应。
step(H,'-',Hd,'--')
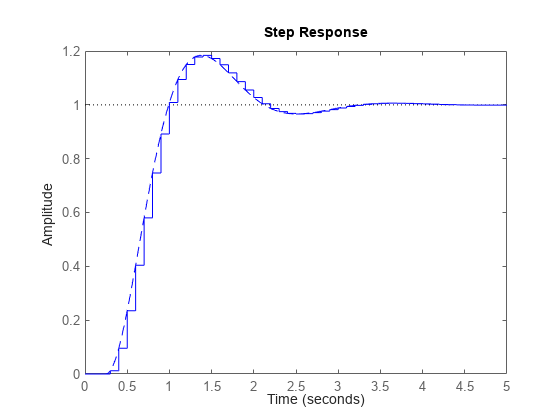
对输入使用零阶保持并使用 10Hz 采样率,离散化以下延迟传递函数。
h = tf(10,[1 3 10],'IODelay',0.25);
hd = c2d(h,0.1)hd =
0.01187 z^2 + 0.06408 z + 0.009721
z^(-3) * ----------------------------------
z^2 - 1.655 z + 0.7408
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
在此示例中,离散化模型 hd 有三个采样周期的延迟。离散化算法将残差半周期延迟纳入 hd 的系数中。
比较连续时间模型和离散化模型的阶跃响应。
step(h,'--',hd,'-')
自 R2024a 起
创建具有两个状态和一个输入延迟的连续时间状态空间模型。
sys = ss(tf([1,2],[1,4,2])); sys.InputDelay = 2.7
sys =
A =
x1 x2
x1 -4 -2
x2 1 0
B =
u1
x1 2
x2 0
C =
x1 x2
y1 0.5 1
D =
u1
y1 0
Input delays (seconds): 2.7
Continuous-time state-space model.
Model Properties
使用突斯汀离散化方法和蒂兰滤波器对模型进行离散化,以对小数延迟进行建模。采样时间 Ts = 1 秒。
opt = c2dOptions('Method','tustin','ThiranOrder',3); sysd1 = c2d(sys,1,opt)
sysd1 =
A =
x1 x2
x1 -0.4286 -0.5714
x2 0.2857 0.7143
B =
u1
x1 0.5714
x2 0.2857
C =
x1 x2
y1 0.2857 0.7143
D =
u1
y1 0.2857
(values computed with all internal delays set to zero)
Internal delays (sampling periods): 1 1 1
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
默认情况下,该函数将额外延迟建模为离散化模型中的内部延迟。要将额外延迟建模为离散化模型中的状态,请将 c2dOptions 的 DelayModeling 选项设置为 'state'。
opt2 = c2dOptions('Method','tustin','ThiranOrder',3,'DelayModeling','state'); sysd2 = c2d(sys,1,opt2)
sysd2 =
A =
x1 x2 x3 x4 x5
x1 -0.4286 -0.5714 -0.00265 0.06954 2.286
x2 0.2857 0.7143 -0.001325 0.03477 1.143
x3 0 0 -0.2432 0.1449 -0.1153
x4 0 0 0.25 0 0
x5 0 0 0 0.125 0
B =
u1
x1 0.002058
x2 0.001029
x3 8
x4 0
x5 0
C =
x1 x2 x3 x4 x5
y1 0.2857 0.7143 -0.001325 0.03477 1.143
D =
u1
y1 0.001029
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
离散化模型现在包含对应于三阶 Thiran 滤波器的三个附加状态 x3、x4 和 x5。由于时滞除以采样时间为 2.7,因此三阶 Thiran 滤波器 ('ThiranOrder' = 3) 可以逼近整个时滞。
估计连续时间传递函数,并将其离散化。
load iddata1 sys1c = tfest(z1,2); sys1d = c2d(sys1c,0.1,'zoh');
估计二阶离散时间传递函数。
sys2d = tfest(z1,2,'Ts',0.1);比较离散化连续时间传递函数模型 sys1d 和直接估计的离散时间模型 sys2d 的响应。
compare(z1,sys1d,sys2d)
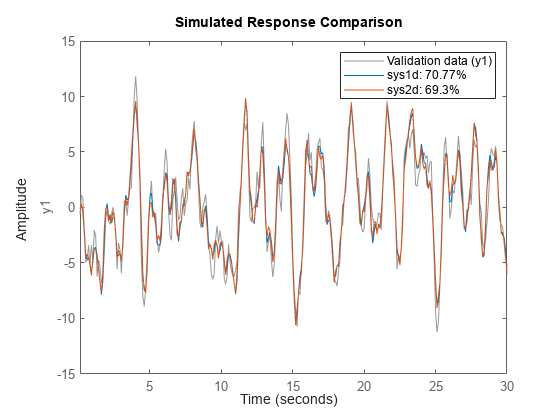
这两个系统几乎完全相同。
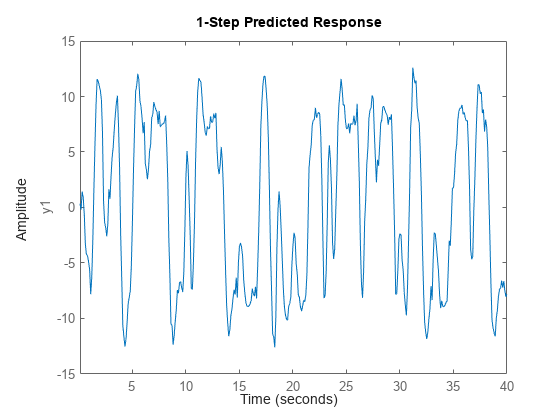
对一个辨识的状态空间模型进行离散化,以构建其响应的向前一步预测器。
使用估计数据创建一个辨识的连续时间状态空间模型。
load iddata2
sysc = ssest(z2,4);预测 sysc 的超前 1 步预测响应。
predict(sysc,z2)
离散化该模型。
sysd = c2d(sysc,0.1,'zoh');从离散化模型 sysd 构建一个预测器模型。
[A,B,C,D,K] = idssdata(sysd); Predictor = ss(A-K*C,[K B-K*D],C,[0 D],0.1);
Predictor 是双输入模型,它使用测量的输出和输入信号 ([z1.y z1.u]) 来计算 sysc 的超前 1 步预测响应。
仿真预测器模型以获得与 predict 命令相同的响应。
lsim(Predictor,[z2.y,z2.u])
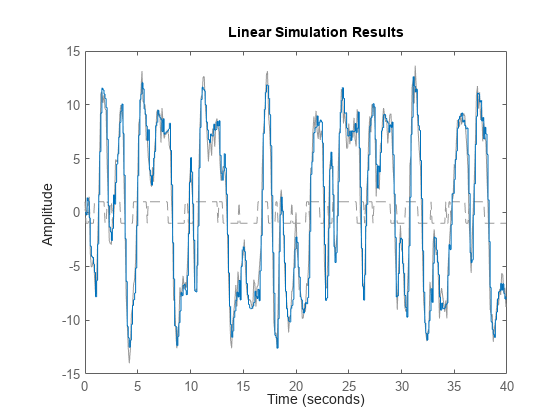
预测器模型的仿真给出与 predict(sysc,z2) 相同的响应。
输入参数
输出参量
版本历史记录
在 R2006a 之前推出另请参阅
c2dOptions | d2c | d2d | thiran | translatecov (System Identification Toolbox) | 转换模型速率